


{kind=link}
{kind=link}
{kind=link}
{kind=link}
腹腔镜超声在达芬奇机器人手术中的应用研究
[周骏1 , 梁朝朝1  , 邰胜
, 邰胜1 , 杨诚1 , 施浩强1 , 郝宗耀1 ]
, 邰胜|
|


目的:探讨腹腔镜超声在达芬奇机器人手术中的应用价值。方法:回顾性分析2014年9月~2017年9月收治的18例行达芬奇机器人辅助腹腔镜联合使用腹腔镜超声(RLUS)手术患者的临床资料,其中男12例,女6例。内生性肾肿瘤13例,行RLUS定位机器人辅助腹腔镜肾部分切除术;肾癌合并腔静脉瘤栓1例,行RLUS定位机器人辅助腹腔镜肾癌根治+下腔静脉切开取瘤栓术;肾盂输尿管连接部梗阻合并肾结石4例,行RLUS定位机器人辅助腹腔镜肾盂输尿管离断成形+输尿管软镜取石术。结果:18例患者均行机器人辅助腹腔镜手术顺利完成。13例肾部分切除术患者手术时间为55~70 min,平均60 min,术中出血20~100 ml,平均35 ml,术后病理:12例为透明细胞癌,1例为乳头状细胞癌,切缘均为阴性,术后随访3~35个月,未发现复发及转移。1例行右肾癌根治+下腔静脉切开取瘤栓术患者手术时间135 min,术中出血110 ml。术后病理为右肾透明细胞癌,静脉内瘤栓形成 ,术后随访3个月,未出现复发及转移。4例肾盂输尿管离断成形+输尿管软镜取石术患者手术时间95~135 min,平均110 min,术后2个月拔除双J管。术后3个月行B超检查,显示积水均较术前明显缓解,2例行IVU检查,患侧输尿管均可全程显影。结论:达芬奇手术机器人联合腹腔镜超声可以在术中准确定位,辅助完成一系列复杂手术,手术效果良好。
Objective: To explore the application value of Robot-assisted laparoscopic ultrasound in Da Vinci robotic operations.Methods: A retrospective analysis on the clinical data of 18 cases subject to Da Vinci robotic assisted laparoscopic surgery in our hospital using laparoscopic ultrasound (Robot-assisted laparoscopic ultrasound, RLUS) in operations were collected, between September 2014 and September 2017. There were 13 cases of endogenous renal tumor receiving partial nephrectomy; 1 case of renal carcinoma combined with inferior vena cava tumor thrombus receiving radical nephrectomy and thrombectomy and 4 cases of ureteropelvic junction obstruction combined renal calculi receiving pyeloplasty and ureteroscopic lithotripsy with RLUS positioning.Results: All 18 cases were performed successfully with robotic assisted laparoscopic surgery. The operative time of 13 cases of partial nephrectomy was 55-70 min (average 60 min), and estimated blood loss was 20-100 mL (average 35 mL). There were 12 cases of clear cell carcinoma, and 1 case of papillary carcinoma. All samples had negative margin, postoperative follow-up period was 3-35 months, and no recurrence or metastasis was found. The surgical time of radical nephrectomy and thrombectomy was 135 min, and estimated blood loss was 110 mL. The renal clear cell carcinoma with inferior vena cava tumor thrombus was confirmed pathologically, and during a follow-up period of 3 months, no recurrence or metastasis was found. The operative time of pyeloplasty and ureteroscopic lithotripsy was 95-135 min (mean 110 min), and the double J tube was removed at 2nd month after surgery. Hydronephrosis was significantly alleviated at 3rd month after operations, and IVU reexamination showed the clear unobstructed ureter in 2 cases.Conclusions: The application of Robot-assisted laparoscopic ultrasound in Da Vinci robotic operations can accurately locate the focus and achieve a series of complicated operations.
随着腹腔镜技术的迅猛发展, 泌尿外科的开放手术已经逐步被腔镜取代, 尤其是达芬奇机器人手术的引入, 使我国的腹腔镜技术的发展又上了一个新的台阶。达芬奇机器人手术系统具有高清立体的手术视野和极其灵活的机械臂, 十分有利于一些复杂手术的开展, 如肾部分切除术、下腔静脉取瘤栓术等, 尤其是第二代Si系统将一些先进的医疗技术整合到一起, 如术中超声的使用, 满足了一些复杂手术的特殊需要。我院自2014年9月引入Si型达芬奇机器人手术系统, 利用其配置的BK公司8826型腹腔镜超声探头, 完成了18例疑难复杂手术, 现报告如下。
收集2014年9月~2017年9月我院行达芬奇机器人辅助腹腔镜联合使用腹腔镜超声(Robot-assisted laparoscopicultrasound, RLUS)手术的18例患者临床资料, 纳入标准为需要术中应用超声的内生性肿瘤患者、肾癌合并腔静脉瘤栓的患者和UPJO合并肾结石的患者。
内生性肾肿瘤13例, 男8例, 女5例, 年龄42~75岁, 平均63岁。肿瘤位于左侧6例, 右侧7例, 直径1.5~3.0 cm, 平均2.0 cm , 所有患者术前均行增强CT或MRI 临床确诊, 其中9例行CTA, 1例行MRA。6例合并高血压, 2例合并糖尿病, 术前血生化检查, 1例肾功能为148 mmol/L, 轻度异常。所有患者经术前检查, 均排除远处转移。
肾癌合并腔静脉瘤栓1例, 男, 49岁。右侧, 肿瘤直径8.0 cm, 腔静脉瘤栓梅约分级为Ⅰ 级, 术前行CTA临床确诊, 明确腔静脉瘤栓的长度, 并排除淋巴结及远处转移, 血生化检查未见异常。
UPJO合并肾结石4例, 男3例, 女1例, 年龄18~56岁, 平均42岁, 左侧2例, 右侧2例, 术前均行IVP、CT平扫及逆行造影确诊。
所有患者均采用气管插管+全身麻醉, Si型达芬奇机器人系统辅助腹腔镜手术。13例内生性肾肿瘤患者行RLUS定位机器人辅助腹腔镜肾部分切除术; 1例肾癌合并腔静脉瘤栓, 行RLUS定位机器人辅助腹腔镜肾癌根治+下腔静脉取瘤栓术; 4例肾盂输尿管连接部梗阻合并肾结石患者, 行RLUS定位机器人辅助腹腔镜肾盂输尿管离断成形+输尿管软镜取石术。
RLUS定位机器人辅助腹腔镜肾部分切除术, 患者取健侧卧位, 腰腹联合途径[1], 首先游离出肾动脉并暴露肾实质表面, 通过RLUS对肿瘤进行定位(图1), 确定肿瘤的边界后, 再分别向外0.5 cm处用电剪做一标志, 然后阻断肾动脉, 沿标志处切除肿瘤及周围0.5 cm左右正常肾组织, 保证肿瘤包膜完整, 用V-LOC倒刺缝线双层缝合肾创面, 如有集合系统损伤, 需一并修补; RLUS定位机器人辅助腹腔镜肾癌根治+下腔静脉切开取瘤栓术, 患者取健侧斜仰卧位, 首先暴露下腔静脉, 于下腔静脉左侧分离并离断右肾动脉, 游离出双侧肾静脉, 离断右精索静脉、腰静脉, RLUS判断下腔静脉内瘤栓的近心段位置(图2), 并明确有无血栓形成, 依次阻断下腔静脉远心端、双侧肾静脉和下腔静脉近心段, 于瘤栓远端切开下腔静脉, 取出瘤栓, 离断右肾静脉, 完整切除右肾及肿瘤, 最后缝合下腔静脉; RLUS定位机器人辅助腹腔镜肾盂输尿管离断成形+输尿管软镜取石术, 患者取健侧斜仰卧位, 首先分离出肾盂输尿管连接部, 切开肾盂, RLUS了解肾结石分别位于哪些肾盏, 联合输尿管软镜, 在RLUS指引下, 分别进入目标盏, 使用套石篮取出结石(图3), RLUS再次确认无结石残留, 切除梗阻段, 裁剪多余的肾盂, 将输尿管上段纵行切开后与剩余的肾盂斜行吻合并留置双J管。
 | 图1 RLUS对肿瘤进行定位 |
 | 图2 RLUS判断下腔静脉内瘤栓的位置 |
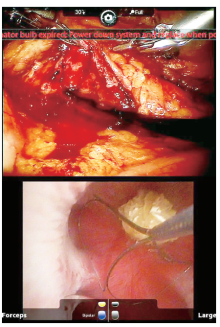
 | 图3 套石篮套取出结石 |
18例患者均顺利完成机器人辅助手术, 无中转开放或传统腹腔镜手术, 无术中输血病例。
13例肾部分切除术患者手术时间为55~70 min, 平均60 min, 术中出血20~100 ml, 平均35 ml, 术后引流管放置3~4 d, 术后住院时间5~8 d。患者术后病理:12例为透明细胞癌, 1例为乳头状细胞癌, 切缘均为阴性, 术后随访3~35个月, 未发现复发及转移。1例行右肾癌根治+下腔静脉切开取瘤栓术患者手术时间135 min, 术中出血110 ml, 术后3 d拔除引流管, 术后住院时间为8 d。患者术后病理为右肾透明细胞癌, 静脉内瘤栓形成 , 术后随访3个月, 未出现复发及转移。4例肾盂输尿管离断成形+输尿管软镜取石术患者手术时间95~135 min, 平均110 min, 术后引流管留置3~4 d, 导尿管留置6~7 d, 术后住院时间5~8 d。患者术后2个月拔除双J管, 术后3个月行B超检查示积水均较术前明显缓解, 2例行IVU检查, 患侧输尿管全程显影。
随着腹腔镜技术的不断进步和完善, 腹腔镜手术已经逐步取代了泌尿外科大多数传统开放手术, 包括许多复杂性手术, 例如肾部分切除术、下腔静脉瘤栓取出术、肾盂输尿管离断成形术等都可通过腹腔镜完成, 并且成为推荐的标准术式。但是, 腹腔镜手术存在一些缺点, 如缺乏直接触觉反馈, 术者的手不能直接与器官接触, 因而一些特殊的情况会使手术比较困难, 如完全内生性肾肿瘤的位置和切除范围的确定, 下腔静脉瘤栓范围的确认, 肾盂输尿管连接部梗阻合并肾结石的患者, 术中结石的取出等, 通过传统腹腔镜手术完成均有一定难度, 因此, 为了满足术中对目标物的准确定位, 术中超声被越来越多地应用到腹腔镜手术当中。
腹腔镜超声[2](laparoscopic ultrasound, LUS)即是术中超声与腹腔镜相结合的技术, 直接扫描病变部位, 缩短了超声传感器与器官接触的距离, 并且可以产生实时动态监测的效果。目前, 腹腔镜超声在外科领域已经获得广泛的应用, 除了泌尿外科以外, 还被应用在胆总管结石探查、结肠癌肝转移灶切除等腹腔镜手术方面[3, 4], 获得了减小创伤、准确定位的效果。而在泌尿外科领域, 腹腔镜超声在肾部分切除术中应用最为广泛, 主要针对内生性和肾门部肾肿瘤的切除[5]。对于腹腔镜手术超声的应用价值, 有学者通过对外科医生关于腹腔镜手术中超声应用的问卷调查, 认为大多数外科医生都认同超声在腹腔镜手术中的作用, 手术者可以通过术中超声了解脏器更多的信息, 如血管的走向、肿瘤的边界等, 可以增加腹腔镜肿瘤切除手术的安全性[6]。
在术中超声应用的早期, 尚缺乏专门的腹腔镜超声探头, 因此制约了其在腹腔镜手术的应用。目前, 我们常用的超声探头包括线形扫描和凸阵扫描传感器探头两种, 由于腹腔镜手术中穿刺器的限制, 我们在临床工作中多采用线性传感器探头, 方便从穿刺器进入体内, Si达芬奇手术系统配置的即为8826型线性传感器探头, 并且在探头的背侧专门设计了方便机器人机械臂的强力抓钳钳夹的构件, 探头没有手柄完全由线缆连接, 以方便探头在体内灵活地操作(图4)。
 | 图4 BK公司8826型腹腔镜超声探头 |
传统的腹腔镜超声使用时由于超声图像和手术图像显示在不同显示屏上, 手术者虽然可以操作探头, 但无法同时兼顾到两组图像, 存在滞后的现象, 给手术的准确定位带来一定困难。而Si达芬奇手术机器人系统将术中超声图像与手术图像整合到一起, 形成所谓“ 画中画” 的效果(如图1、2、3), 使以上的情况得到了改观。手术者在医生操作台通过机械臂操作术中超声探头, 可同时观察显示在显示屏上的术中影像和超声图像, 并能根据超声图像来实时调整探头位置。
我科利用Si达芬奇机器人手术系统的RLUS完成一系列需要术中准确定位的复杂手术, 现将经验总结报告如下。
内生性肾肿瘤是指肿瘤完全为肾实质包裹, 在肾表面无法肉眼看到或摸到。这类肿瘤的特点是位置深, 通常邻近肾窦或集合系统, 部分靠近肾门部, 毗邻较大的肾血管, 因此定位困难, 切除时容易切缘阳性, 并损伤集合系统或大血管, 导致术后并发症的发生。早在1991年, Assimos 等[7]就报道了术中超声定位开放肾部分切除术治疗内生性肾肿瘤的方法, 并获得了和根治手术一样的效果。在腹腔镜肾部分切除术逐步取代开放手术后, 早期由于缺乏合适的腹腔镜术中超声探头, 增加了腹腔镜内生性肿瘤肾部分切除术的难度。随着不同类型的腹腔镜专用超声探头的出现, 腹腔镜术中超声实时监测的肾部分切除术成为治疗内生性肾肿瘤的标准术式[8, 9]。而机器人手术中, 由于灵活的机械臂可以使分离切割更加准确彻底, 缝合操作更为简单精确, 因而可以使肾部分切除术达到最佳效果[10]。尤其是针对传统腹腔镜中LUS的不便, Si型达芬奇手术机器人系统中RLUS的“ 画中画” 效果实现了真正的超声实时监测(图1), 手术者可以同时操作超声探头和观察超声图像, 达到准确定位的目的, 在切除肿瘤可以准确的把握肿瘤的界限, 减少切缘阳性的发生[11]。而本资料中的13例内生性肾肿瘤, 均通过RLUS定位后, 行肾部分切除术, 术后病理证实切缘均为阴性, 达到准确定位、缩短热缺血时间的目的。
肾癌合并下腔静脉瘤栓是T3期的晚期肾癌, 曾经是腹腔镜手术的禁区, 随着达芬奇机器人腹腔镜技术的不断进步, 机器人辅助腹腔镜下下腔静脉瘤栓取出术也越来越成熟[12], 0~Ⅱ 级(梅约五级分类法)的瘤栓都可通过机器人完成, 但是术中对瘤栓侵犯下腔静脉的准确范围以及有无静脉血栓形成(有部分病例可能会在完成影像学检查后, 待手术前在瘤栓的近心端形成静脉血栓)无法通过机械臂的触碰来判断, 因此, 利用RLUS来准确判断下腔静脉阻断的范围(图2), 对手术的安全进行十分重要。本资料中1例下腔静脉瘤栓患者为Ⅰ 级瘤栓, 通过RLUS定位后, 排除了静脉血栓形成的可能, 并确定了阻断的范围, 顺利切除肿瘤, 取出瘤栓, 手术顺利完成。
肾盂输尿管离断成形术是治疗UPJO的“ 金标准” , 而机器人腹腔镜手术凭借其缝合的优势[13], 可以完全将开放手术中的肾盂输尿管离断成形术复制到腹腔镜手术中, 有望取代开放手术成为新的“ 金标准” [14]。UPJO导致的肾积水往往会合并继发性肾结石, 传统腹腔镜手术由于使用的是直柄器械末端无法弯曲, 故难以完成肾盏内的取石。国内有学者尝试通过LUS术中定位行腹腔镜肾实质切开取石术, 并取得成功, 但手术创伤较大[15]。我们在机器人辅助腹腔镜UPJ离断成形术中, 通过RULS准确定位, 首先了解结石位于哪个盏, 再联合输尿管软镜进入肾盏取石(图4), 取石完成后, 还可通过RULS判断是否取净, 真正达到“ 微创治疗, 有的放矢, 取石务净” 的效果, 4例手术均获成功。
因此, 通过以上手术的尝试与实践, 在达芬奇机器人腹腔镜手术中, 通过术中与腹腔镜超声的整合, 可以达到手术影像与超声图像同步的效果, 实现精准定位, 能够完成一些复杂的腹腔镜手术, 并取得良好的效果。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|