

{kind=link}
{kind=link}
机器人肾移植术学习曲线分析
[范阳, 王瀚锋, 祖强, 沈东来, 赵鉴明, 陈欣, 郝晓伟, 董隽*  , 张旭
, 张旭* ]
, 张旭]
|
|


目的:本研究旨在分析机器人肾移植术操作者的学习曲线,并描述了相关手术技巧和供肾局部低温技术的优化。方法:研究共纳入自2018年3月至2021年9月在解放军总医院接受机器人肾移植术(Robot-assisted kidney transplantation,RAKT)的18例终末期肾病患者,手术均由具有丰富开放性肾移植术和机器人手术经验的同一手术团队完成。绘制累积和图和休哈特控制图用以评估操作者的学习曲线和技术质量控制及患者安全性。结果:累积和分析显示,机器人手术时间、移植肾复温时间、动、静脉吻合时间均有一个显著的初始学习阶段,即在例数达到10例时进入平台期,提示该四项的学习阶段均需要至少10例,之后可获得相应稳定的能力。进一步的休哈特控制图表明,机器人手术时间和静脉吻合时间均未超过警戒线和警报线,提示上述两项技术结果稳定,未受到手术过程中个人或系统的影响。94.4%的移植肾复温时间低于警戒线,83.3%的动脉吻合时间低于警戒线,且此两项技术指标无一例超过警报线,提示虽然在最初的病例中,部分病例移植肾复温时间和动脉吻合时间在控制范围之外,但总体逐渐改善并稳定缩短。术前eGFR与术后6个月的eGFR的差值均值在67.69 ml/min,提示术后移植肾功能良好。结论:在机器人手术时间、移植肾复温时间及动、静脉吻合方面,一个经验丰富的外科团队至少需要10例经验才能达到稳定的重复性。
, Zhang Xu
Objective: To analyze the operator’s learning curve for robot-assisted kidney transplantation, and report the surgical techniques and optimized technique of regional hypothermia of donor kidney.Methods: Totally, 18 patientswith end-stage renal disease undergoing robot-assisted kidney transplantation at the Chinese PLA General Hospital between March 2018 and September 2021 were included. All of surgeries were performed by the same surgical team with rich experience in the field of open kidney transplantation and robot-assisted surgery. The Cumulative sum analysis and Shewhart control charts were used to evaluate the operator’s learning curve, technical quality control and patients’ safety.Results: The cumulative sum analysis showed that there wasa significantly initial learning stage in robotic-operation time, re-warming time, arterialanastomosis time,venous anastomosis time, all these fouritemsentered the platform stage when the number of cases reached 10. It was suggested that at least 10 cases were needed in the learning stage of the four items, and then the corresponding stable abilities could be obtained. The further Shewhart control charts showed that the robotic-operation time and venous anastomosis time did not exceed the warning line and alarm line, suggesting that the results of the above two techniques were stable and were not affected by the individual or systemicfactors during the operation. Meanwhile, 94.4% of the rewarming time was shorter than the warning line, 83.3% of the arterial anastomosis time was shorter than the warning line, but none of these two technical items exceeded the alarm line, suggesting that although in the initial cases, the rewarming time and arterial anastomosis time in some cases were out of control, the overall improvement and stable shortening could be obtained. The difference between eGFR before operation and at 6th month after operation was 67.69mL/min, indicating that the kidney functioned well.Conclusion: An experienced surgical team needs at least 10 cases of experience to achieve stable repeatability in terms of robotic-operation time, rewarming time and arterial/venous anastomosis.
肾移植术(kidney transplantation, KT)是目前终末期肾病患者最佳的肾脏代替治疗方法[1]。开放式手术是KT的首选技术和金标准, 但以机器人辅助腹腔镜为代表的微创技术在近几年越来越受到关注, 并逐步应用于KT以降低开放式手术的高并发症率和死亡率[2]。Giulianotti等人于2010年完成了第一例完全的机器人肾移植术(robot-assisted kidney transplantation, RAKT)[3]; Menon等人随后利用经腹手术入路和局部低温技术进行了术式改进并将该技术标准化[4]。最近, 欧洲一项囊括120例接受RAKT患者的大规模前瞻性临床研究表明, 该技术不仅安全可行, 而且具有更低的死亡率、更佳的美容效果和与开放手术相似的移植物功能结果[1, 5]; 本中心于2018年开展的一项12名接受RAKT患者的临床研究表明, 术后6个月和1年的平均肾小管滤过率(Estimated glomerular filtration rate, eGFR)分别为63.4 mL/min和62.6 mL/min, 均显示良好的移植肾术后功能[6]。基于前期基础, 本研究旨在描述本中心RAKT的外科技术以及供肾局部低温技术的优化, 并着重评估操作者的学习曲线及手术相关数据及功能结果。
本研究回顾性收集了2018年3月至2021年9月在解放军总医院第一医学中心接受RAKT的18例终末期肾病患者的病历资料, 符合既往报道的RAKT患者的纳入及排除标准[7]。18例手术均由具有丰富开放性肾移植术和机器人手术(> 100例, 包括肾部分切除术、根治性前列腺切除术和肾盂成形术等)经验的同一手术团队完成。供者均为患者直系亲属, 既往体健且无手术禁忌症, 系自愿无偿捐献。本研究经中国人民解放军总医院伦理委员会批准, 并征得所有患者关于使用机器人手术及围手术期相关数据的书面知情同意。患者基线资料见表1。
| 表1 纳入患者的临床信息(n=18) |
供肾采用常规腹腔镜腹膜后入路切取[8]。RAKT使用达芬奇机器人Si外科操作系统(Intusitive Surgical, 美国), 患者取截石位, 头低脚高约20国, 机器人停靠在两腿之间。手术技术基于Menon等人报道的标准化RAKT[4], 并在此基础上进行了供肾置入腹腔后的局部低温技术的优化。
1.2.1 供肾局部低温技术的优化 切取的供肾经过低温保存液灌注和修剪后, 不同于Menon等人[4]采取的纱布包裹供肾的方法, 我们采用密闭性更好的塑料袋来包裹供肾并将塑料袋中填塞冰屑, 塑料袋肾门处剪口露出肾动静脉以便后期的吻合。通过这种局部低温技术, 塑料材料的隔热效果可以减少肾脏和腹腔环境之间的热交换以致冰屑融化得更慢, 而塑料袋更好的封闭性可以防止融化的冰屑流散到腹腔周围。
1.2.2 套管位置 在活体供体肾切取的同时, 对受者做长约6cm的绕脐腹正中切口, 置入单孔平台(宁波胜杰康生物科技有限公司)并封闭切口, 接入CO2建立气腹。采用与单孔平台相连的12mm套管作为镜头孔套管。1号机械臂和2号机械臂的8mm套管分别置于脐水平距脐左右各8cm处, 3号机械臂的8mm套管置于左侧机械臂套管外侧8cm处; 另一12mm的辅助套管沿右锁骨中线放置在右侧机械臂下方8cm处。
1.2.3 移植肾置入腹腔 打开Retzius间隙, 充分游离右侧髂外动、静脉及膀胱前壁使膀胱下降。摘除机器人镜头及单孔平台, 经该正中切口置入用盛满冰屑的保护袋包裹的移植肾, 确保肾下极朝下, 肾门面向右侧髂外血管, 并用3号机械臂抓钳托住移植肾。之后再次放置单孔平台, 重新对接机器人各机械臂及镜头。
1.2.4 动静脉吻合 与移植肾血管进行吻合的顺序为先肾静脉后肾动脉。利用2个血管阻断夹先后阻断髂外静脉的远心端和近心端, 冷刀纵行切开阻断夹之间的髂外静脉约1.5cm, 之后采用Gore-Tex CV-6缝合线于肾静脉与髂外静脉之间进行端侧吻合, 至吻合完成前用Fr5输尿管导管向肾静脉内注入肝素生理盐水冲洗管腔。待吻合完成后, 用血管夹阻断肾静脉并移除髂外静脉上的2个血管夹, 观察吻合口有无渗血。之后利用2个血管阻断夹先后阻断髂外动脉的近心端和远心端, 以相同方式对肾动脉和髂外动脉进行端侧吻合, 阻断肾动脉后移除髂外动脉的阻断并检测吻合口有无渗血。最后依次移除移植肾静脉、动脉的血管夹, 剪开包裹在肾脏表明的保护袋, 观察肾脏再灌注、血管搏动、吻合口渗血及输尿管口尿液流出情况。
1.2.5 输尿管膀胱吻合术及移植肾腹膜外化 输尿管膀胱吻合术采用改良的Lich-Gregoir技术, 吻合完成前将Fr6双J管置入输尿管和膀胱内, 待吻合完成后缝合切开的膀胱肌层, 并将末端输尿管埋藏于切口之内。因移植肾血管保留相对较长, 遂在输尿管膀胱吻合术前将肾脏翻转至右侧髂窝内并检查是否有潜在的血管扭曲或过度紧张。输尿管膀胱吻合术完成后用倒刺线关闭腹膜使移植肾保持在腹膜外位置, 放置引流管, 拔出套管后逐层缝合切口。
观察并分析机器人操作时间、移植肾热缺血、冷缺血、复温、动静脉吻合及输尿管膀胱再植吻合时间, 术中出血量、并发症及住院天数。对于移植肾术后功能结果评估, 采用术前、术后7天、1个月、6个月及1年的肾小球滤过率(eGFR)。
用累计和分析(Cumulative sum analysis)定量评估学习曲线。累积和是单个数据点和目标值之间的差异的连续总和。当表现达到稳定状态或平台期时, 认为术者个人熟练掌握了该手术技术, 可以结束学习阶段[9]。采用休哈特控制图(Shewhart control charts)进一步评估学习阶段的机器人手术时间, 动静脉吻合时间和复温时间的稳定性。
分类变量采用绝对频数和百分比表示, 连续变量经正态检验若符合正态分布采用均数± 标准差描述, 若不符合正态分布采用中位数和四分位间距描述。P< 0.05被认为具有统计学意义。所有数据采用SPSS 22.0统计软件和GraphPad统计软件分析。
本研究18例行RAKT均顺利完成, 无一例转换为开放术式。活体供肾17例为左侧, 1例为右侧。手术过程对应时间见表1。累积和分析显示, 机器人手术时间、移植肾复温时间、动静脉吻合时间均有一个显著的初始学习阶段, 即在例数达到10例时进入平台期, 提示该四项的学习阶段均需要至少10例, 之后可获得相应稳定的能力(图1)。休哈特控制图表明, 机器人手术时间和静脉吻合时间均未超过警戒线和警报线, 提示上述两项技术结果稳定, 未受到手术过程中个人或系统因素的影响。而94.4%的移植肾复温时间低于警戒线, 且100%低于警报线, 83.3%的动脉吻合时间低于警戒线, 无一例超过警报线, 上述两项结果提示虽然在最初的病例中, 部分病例移植肾复温时间和动脉吻合时间在控制范围之外, 但总体逐渐改善并稳定缩短。(表2, 图2)。术前eGFR与术后6个月的eGFR的差值均值在67.69 ml/min, 提示术后移植肾功能良好(图2)。
| 表2 休哈特控制图目标值(均值), 警戒值(均值+2× 标准差), 报警线(均值+3× 标准差) |
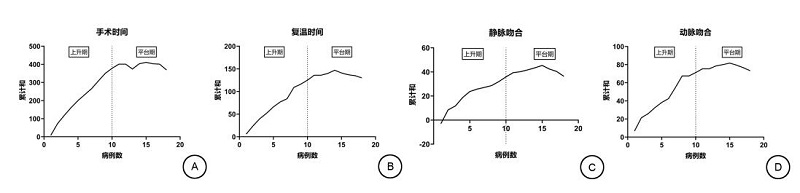 | 图1 累积和分析图 A:机器人手术时间, B:移植肾复温时间, C:静脉吻合时间, D:动脉吻合时间。 |
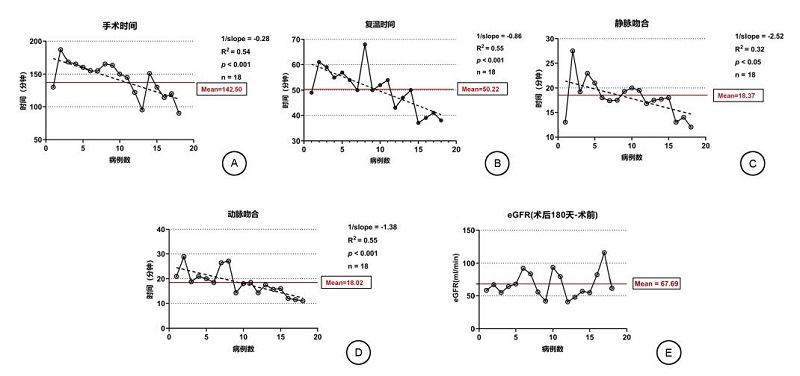 | 图2 休哈特控制图 A:机器人手术时间, B:移植肾复温时间, C:静脉吻合时间, D:动脉吻合时间, E:术后180天eGFR-术前eGFR, Mean为均数。 |
随着微创外科的不断发展, 机器人手术操作系统和技术平台在外科领域已开始显现出传统开放手术甚至腹腔镜手术无法比拟的潜在优势[10]。在肾移植领域, 尽管RAKT已被证明是安全的可行的, 但其特殊的操作平台和技术要求, 与其他任何新技术一样, 拥有独特的学习曲线和教学模式[6, 11, 12]。
一般认为, RAKT的学习主要分为两方面内容。首先是熟知机器人操作系统和技术平台。本中心通过对超过2500例开放性肾移植术和4000多例泌尿外科机器人手术病历资料的分析, 建立了RAKT手术规范, 要求初学者以助手的角色观看手术录像和现场观摩, 熟知各种机械臂的安装及复位、如何放置套管、避免机械臂打架以及腔内器械的使用等, 以期达到使手术衔接流畅, 减少操作失误, 首先顺利成为一名合格的机器人手术助手[13]。在此基础上, 还需要掌握RAKT的手术要领和局部解剖知识。在欧洲多个中心初期开展RAKT过程中均发生过因技术失误导致的移植肾失能的情况[14, 15]。因此要求术者储备充足相关技术并做大量准备工作, 例如先在尸体上进行RAKT或利用动物肾脏模拟进行血管吻合训练等。尽管2014年Menon等人在RAKT过程中采用经腹入路和局部低温技术并将该手术技术和步骤标准化[4], 但对于初学者来说, RAKT仍然是一个具有挑战性的手术。欧洲机器人泌尿学会机器人肾移植小组一项多中心前瞻性研究发现, 即使所有移植中心手术医师均富有泌尿系统机器人手术和开放肾移植手术经验, 且在正式临床研究开展之前经过严格的动物模型培训, 但在最终120例接受RAKT患者中仍有3例患者因动脉血栓导致移植肾切除; 不仅如此, 在控制手术时间、并发症和移植肾功能结果方面, 至少需要35例病例经验技能累积才能达到重复性[12]。而本研究纳入的18例接受机器人肾移植术的患者均使用了活体供肾, 且由具有丰富开放性肾移植术和机器人手术经验的同一手术团队完成, 其在机器人手术时间、移植肾复温时间、动静脉吻合时间均有一个显著的初始学习阶段, 即在例数达到10例时进入平台期, 提示该四项的学习阶段均需要至少10例, 之后可获得相对稳定的手术能力。由于本中心具有丰富的开放性肾移植术和机器人手术经验, 可以为新技术的采用做良好铺垫, 这可能有助于减少和缩短学习曲线。
休哈特控制图是一种时间趋势分析技术, 已被用于工业生产线的质量保证[16, 17], 并可类似地用于监控手术流程和质量[9, 18], 在手术各项技术指标的质量检测及患者安全监测中是一项有用的工具。休哈特控制图有三个关键组成部分:目标值、警戒阈值和警报阈值。目标值表示结果的期望值。警戒阈值和警报阈值分别表示偏离平均值的第二和第三标准差(SD)。阈值被设置为第二和第三个SD, 因为这实现了类型1和类型2错误概率[9, 18, 19]之间的良好平衡, 并且还分别用作具有0.05和0.01概率的显著性检验。本研究中休哈特控制图结果显示, 无论是在初期的学习阶段还是进入平台期后, 机器人手术、移植肾复温以及动静脉吻合技术实施相对稳定且可控, 未受到手术过程个人或系统影响, 且相关指标总体逐渐改善, 时间稳步缩短。整个手术过程的良好可控性和高质量也使患者术后移植肾功能得到很好的保护。
然而Sood等人在研究中同样指出, 有经验的外科医生是没有学习曲线的, 但肾脏复温时间的标准差却显著变宽, 因此建议在所有手术中应重点控制肾脏复温时间[9]。快速吻合动静脉可以缩短复温时间, 而优化局部低温技术也可以使动静脉吻合过程更加快速流畅。我们知道, 维持腹腔内移植肾处于低温状态是RAKT最主要的挑战之一[1]。为了避免在复温期间移植肾功能受损, Menon等人在研究中描述了一种用于RAKT的局部低温技术[4], 即在血管吻合过程中使用充满冰屑的纱布包裹移植肾, 并间断添加冰屑以保证移植肾在腹腔内的持续冷却。这种方法的缺点是, 用纱布包裹的冰屑很容易融化, 因此在手术过程中需要不断地添加冰屑到肾脏周围, 影响手术的连续性; 同时, 融化的冰屑会通过纱布流入腹腔, 导致患者术后发生肠梗阻的风险上升[1612]。Tugcu等人研究显示, 15例接受RAKT的患者中有2例因添加的冰屑而出现术后麻痹性肠梗阻[20]。基于此, 笔者对该技术进行了改进, 选择了密封性更好的塑料袋来包裹移植肾, 并用冰屑填充。其主要优势有两点:(1)使用了双层塑料袋, 冰屑填充在不直接接触肾脏的两层塑料之间, 塑料袋的隔热作用可以减少肾脏与环境之间的热交换; (2)即使冰屑部分融化, 也会形成冰水混合物, 继续环绕肾脏, 不会扩散到腹腔, 使肾脏保持相对恒定的低温, 在很大程度上预防了麻痹性肠梗阻及其他并发症的发生。本中心前期研究发现, 移植肾周围的冰屑在血运重建之前并没有完全融化, 这也使复温过程中肾表面温度稳定维持于20℃左右, 因此手术过程中并没有再次添加冰屑, 且术后无一例麻痹性肠梗阻并发症出现[6]。除此之外, 本研究纳入的18例接受RAKT的患者均使用了活体供肾, 在移植肾血管保留得足够长的前提下, 术者在输尿管膀胱吻合术前将肾脏翻转至右侧髂窝内, 并检查是否有潜在的血管扭曲或过度紧张, 最后在输尿管膀胱吻合后用倒刺线关闭腹膜, 使移植肾保持在腹膜外。移植肾的腹膜外化不仅可以防止移植肾急性扭转的风险, 而且可以缩减术后下地活动天数和住院天数[10]。
总之, 本研究旨在分析RATK初学者的学习曲线, 并描述了RAKT的手术技巧及供肾局部低温技术的优化。使用累积和和休哈特控制图分析技术可以回顾性地评估RATK的学习曲线并检测手术质量及患者安全性。此外, 在进行RAKT时, 有经验的外科团队需要至少10例患者才能在机器人手术、移植肾复温以及动静脉吻合方面取得积极的稳定的技术结果。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|