


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
机器人全腔内studer原位新膀胱术手术经验总结及临床疗效分析(附单中心10例报道)
[程强1 , 艾青1 , 陈文政1 , 王保军1 , 许勇1 , 秦捷1 , 黄庆波1 , 马鑫1 , 李宏召1  , 张旭
, 张旭1 ]
, 张旭]
|
|


目的:总结机器人全腔内studer原位新膀胱术(RISON)的手术经验和临床疗效。方法:回顾性分析2018年4–8月在中国人民解放军总医院接受RISON手术共10例患者的基线资料及围手术期结果,并对RISON手术术前准备、机器人位置、穿刺套管位置的设计进行描述,并对其中关键步骤和技术要点进行经验总结,同时对所有患者进行术后随访,统计术后膀胱容量、控尿情况,性功能情况及发生的近期和远期并发症,进一步评估临床治疗效果。结果:所有10例手术均成功完成,无一例中转开放手术或更改尿流改道术式,中位手术时间420 min(300~540 min),术中出血量250 mL(100~800 mL),排气时间3 d(2~4 d),术后下床活动时间2 d(1~7 d),耐受进食时间5 d(4~8 d)。患者术后病理分期:6例T2N0M0,4例T1N0M0(膀胱肿瘤电切术后),切缘均为阴性,1例患者合并前列腺腺癌,淋巴结清扫20~25个。2例患者发生近期并发症(≤30 d),9例患者发生远期并发症(>30 d),Clavien Ⅰ 级3例,Clavien Ⅱ级5例,ClavienⅢ级1例,再入院率50%。单从手术疗效分析看,患者术后中位膀胱容量300 mL(0~400 mL),其中1名女性患者发生尿失禁,其余9名男性患者白天均能控制排尿,夜晚需定时排尿(平均4次),2例保留性神经患者术后均能获得较为满意的勃起,性功能评分15分以上。无一例患者术后死亡,平均随访6个月(3~7个月)。结论:机器人全腔内studer原位新膀胱术是一种安全可行的尿流改道术式,术后大部分患者均能获得满意的疗效。
, ZHANG Xu
Objective: To summarize the clinical experience and efficacies of robotic intracorporeal studer orthotopic neobladder (RISON).Method: The baseline and perioperative data of 10 patients undergoing RISON in our single center between January to August in 2018 were reviewed. The preparation, manipulation of robot and the location of trocars were described. The tips and tricks of key procedures and techniques were introduced. Meanwhile, further follow-up was also conducted to evaluate the clinical effect, including bladder capacity, urinary controlling, sexual function, short-term and long-term complications.Results: All the RISONs were successfully performed without conversion to open surgery or changing urinary diversion. Nine men and 1 woman with a median age of 61 years old (range 26-69) and BMI of 25 (20.3-33.8) were included. Median operation time was 420 min (range 300-540 min), median blood loss was 250 mL (range 100-800 mL), time to return of flatus 3 days (range 2-4 days), full ambulation 2 days (range 1-7 days), full tolerance 5 days (range 4-8 days). TNM stage: T2N0M0 6 cases, T1N0M0 4 cases (after transurethral resection of bladder tumor). Surgical margins were negative in all cases. One patient had prostate cancer meantime. The lymph nodes’ number of each case was 20-25. Overall, 2 patients experienced short-term complication (within 30 days), and 9 patients encounted long-term complication (out of 30 days), including Clavien Grade Ⅰ 3 cases, Grade Ⅱ 5 cases and Grade Ⅲ 1 case. From the perspective of surgical effects, full bladder volume was 300 mL (range 0-400 mL). Except 1 female patient can’t control urination, the remaining 9 male patients obtained micturition control during the day and regular micturition during night. Two cases of reserved nerve patients obtained relatively satisfactory erections after surgery with sexual function score above 15 points. No deaths occurred within an average follow-up period of 6 months (range 3-7 months).Conclusion: RISON is a safe and feasible method for urinary diversion. Most patients can get satisfactory curative effect after operation.
据统计, 膀胱癌在人群肿瘤发病率排名第11位, 其中男性发病率为9.0/10万, 女性发病率为2.2/10万[1]。中国泌尿外科协会指南指出:根治性全膀胱切除术及扩大淋巴结清扫术是非转移肌层浸润性膀胱癌、高级别及非肌层浸润性原位膀胱癌、复发或多发膀胱癌及灌注化疗药物抵抗膀胱癌的标准术式[2], 在切除原发灶后, 患者均需要行尿流改道术, 主要分为非可控性尿流改道与可控性尿流改道。非可控性尿流改道主要包括输尿管皮肤造瘘、回肠膀胱术、结肠膀胱术等手术方式, 而可控性尿流改道分为原位可控膀胱替代与异位可控膀胱替代[3]。我院自2018年4月开展机器人全腔内studer原位新膀胱术(robotic intracorporeal studer orthotopic neobladder, RISON), 目前已成功完成10例, 现对所有病例的手术经验和临床疗效进行总结并报告如下。
2018年4– 8月我院共有10例患者接受RISON手术, 其中男9例, 女1例, 中位年龄61岁(26~69岁)。BMI 25 kg/m2(20.3~33.8 kg/m2), 其中BMI为33.8 kg/m2的患者对应的体重为100 kg。ASA评分1分4例, 2分6例; ECOG评分均为0分; Karnofsky评分均为90分; Comorbidity component score 2分1例, 3分3例, 4分3例, 5分3例。2例患者术前行新辅助化疗。所有患者均签署知情同意书, 并同意此项研究。手术均由同一操作熟练的术者完成。
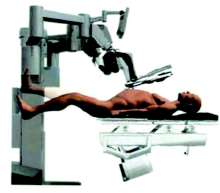
1.2.1 切除膀胱 患者全身麻醉后, 按半截石位用Allen脚蹬固定下肢, 以利于机器人设备进入会阴区。然后消毒、铺单。插入F14尿管, 用10 mL生理盐水充盈气囊。于脐内边缘以尖刀横行切开一个长为3 mm皮肤切口, 用Veress针建立气腹, 保持腹腔压力为1.596~1.862 kPa(12~14 mmHg), 于脐正中上方两横指处插入12 mm套管, 作为机器人镜头臂通道。置入镜头, 直视下放置其他套管:两个8 mm套管分别放置于平脐水平线两侧距脐8~10 cm位置, 其中右侧为机器人1号操作臂通道, 左侧为机器人2号操作臂通道。第3个8 mm操作臂通道放在右侧操作臂通道外侧8~10 cm处。于左侧2号操作臂外上方8~10 cm处, 镜头臂通道水平放置12 mm套管作为助手通道。对于有腹部手术史或者腹膜炎病史导致肠道粘连的患者, 可选用Hasson技术。患者取35~45° 的Trendelenburg体位, 机器人以脐正中线为轴向患者分开的两腿间移动(图1)。对接机器人之后安装镜头, 1号臂放置单极弯剪, 2号臂放置双极Maryland钳, 3号臂放置Cardiere钳, 在镜头直视下将各器械插入腹腔, 助手位于患者左侧[4]。
 | 图1 切除膀胱体位 |
1.2.2 缝制膀胱 在膀胱切除完成后, 移开所有机械臂及机器人, 恢复患者体位角度, 使患者保持平卧分腿位(图2)。于反麦氏点在置入12 mm套管, 作为切割闭合器通道, 位于正中线耻骨联合上2 cm置入5 mm Trocar用于放置单J管, 所有套管位置如图3。
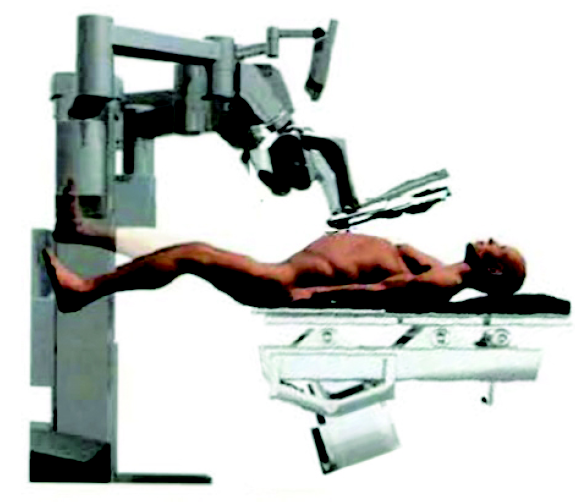 | 图2 缝制新膀胱体位 |
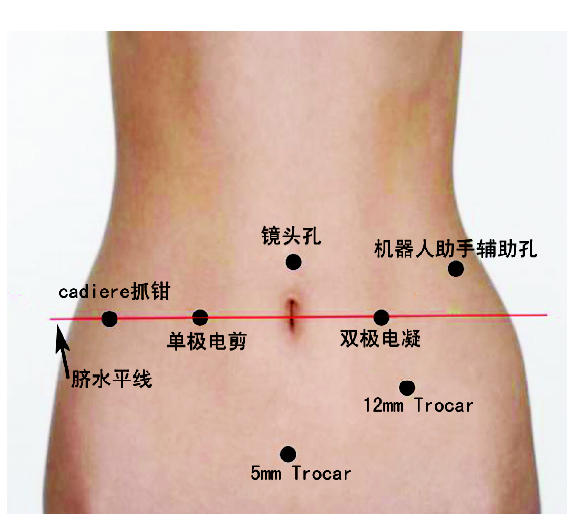 | 图3 套管位置如图 |
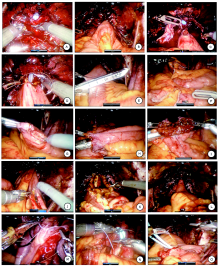
具体切除膀胱及淋巴结清扫的手术步骤参考《泌尿外科腹腔镜与机器人手术学》[5]。缝制新膀胱的手术关键步骤为:①合并输尿管:充分游离乙状结肠悬韧带, 将左侧输尿管从骶前移位到右侧; ②降回肠, 减张力:将目标回肠下拉至尿道处, 如张力过大, 可通过松解肠系膜的方法减小回肠尿道吻合的张力, 并用4-0倒刺线加固尿道后壁; ③锚定膀胱颈:距离回盲部约30~40 cm锚定回肠最低点, 通过尿管确定新膀胱颈口的位置后, 用4-0倒刺线单针连续缝合法行尿道肠管吻合; ④处理肠道:截取构建新膀胱所需回肠约50 cm, 并用GIA侧侧吻合法恢复回肠连续性, 可采用多个钉仓进行侧侧吻合, 进一步扩大通道, 防止肠道狭窄; ⑤构建新膀胱:保留近心输入端10 cm肠管不去管化, 将其余40 cm肠段沿对系膜缘去管化, 随后用4-0倒刺线连续缝合肠片后壁成U形再对折肠片前壁缝合成近似球形, 前壁近心端暂不缝合; ⑥吻合输尿管:缝合完成后, 劈开输尿管1.5 cm左右, 并用5-0可吸收线连续缝合输尿管内侧壁, 留置单J管, 采用Wallace法吻合输尿管和输入袢肠段末端, 关闭新膀胱前壁近心端; ⑦测试新膀胱:最后经尿管注水50 mL, 检测新膀胱是否有漏口。手术过程如图4所示。
 | 图4 新膀胱缝制的关键步骤 A:4-0倒刺线加固尿道后; B:锚定回肠最低点; C:通过尿管确定新膀胱颈口; D:4-0倒刺线单针连续缝合法行尿道肠管吻合; E、F:截取构建新膀胱所需回肠50cm; G、H、I: GIA侧侧吻合法恢复回肠连续性; J:肠段沿对系膜缘去管化; K:4-0倒刺线连续缝合肠片后壁成U形; L:对折肠片前壁缝合成近似球形; M:5-0可吸收线连续缝合输尿管内侧壁; N:留置单J管并用Wallace法吻合输尿管和输入袢肠段末端; O:关闭新膀胱前壁近心端。 |
10例患者手术均顺利完成, 无一例中转开放手术或更改尿流改道术式。中位手术时间420 min(300~540 min), 切除膀胱和淋巴清扫时间均控制在120 min以内; 术中平均出血量250 mL (100~800 mL), 其中1例患者术中输血350 mL; 平均排气时间3 d(2~4 d); 平均术后下床活动天数2 d(1~7 d); 平均术后进食时间5 d(4~8 d)。患者术后病理分期:6例T2N0M0, 4例T1N0M0(膀胱肿瘤电切术后), 切缘均为阴性, 1例患者合并前列腺腺癌, 淋巴结清扫20~25个。共有9例患者发生并发症, 其中2例患者发生近期并发症(≤ 30 d), 均为Clavien Ⅰ 级, 2名患者分别发生细菌性肠炎及伤口淋巴渗液。9例患者发生远期并发症(> 30 d), Clavien Ⅰ 级3例, Clavien Ⅱ 级5例, Clavien Ⅲ 级1例, 其中8名患者发生泌尿系统感染, 1名患者出现腹腔积液, 再入院率50%。单从手术疗效分析看, 患者术后中位膀胱容量300 mL(0~400 mL), 术后随访膀胱造影, 可见膀胱形态良好, 容量> 250 mL, 患者自述稍加腹压排尿通畅(图5)。其中1名女患者暂时无法憋尿, 其余9名男性患者白天均能控制排尿, 夜晚需定时排尿, 2例保留性神经患者术后均能获得较为满意的勃起, 性功能评分分别为15及16分。平均随访6个月 (3~7个月), 随访期内无一例患者死亡。
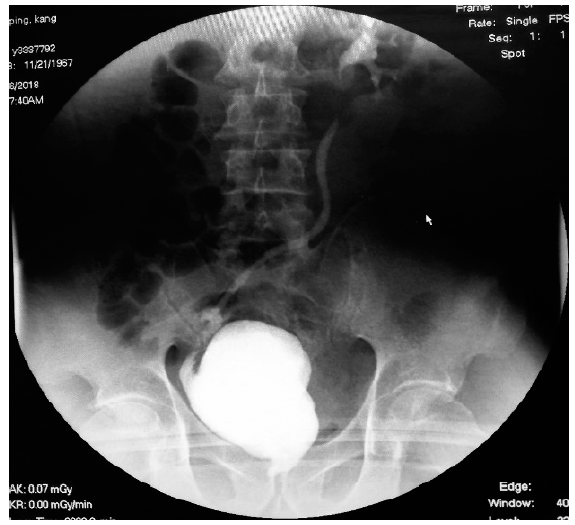 | 图5 患者术后膀胱造影资料 |
据报道, 全腔内尿流改道术(intracorporeal urinary diversion, ICUD)从2005年9%的应用率, 上升到2015年97%的应用率, 其中原位新膀胱术临床应用率从7%上升到17%[6], 随着机器人技术的发展, 这一术式近年来越来越受到术者的青睐。关于其技术优势, Ahmed等[7]通过研究18个医疗中心的935例根治性全膀胱切除术的患者, 统计出共有167例患者接受ICUD, 768例接受体外尿流改道术(extracorporeal urinary diversion, ECUD), 其中ICUD中有106例为回肠流出道术, 61例为原位新膀胱术, 作者回顾性比较ICUD和ECUD的围术期结果及术后并发症等, 发现ICUD组30 d再入院率、90 d并发症发生率、胃肠道并发症发生率、感染发生率及术后输血率均少于ECUD组, 特别是由于输血率是实体恶性肿瘤总体生存率的独立危险因素, 术后输血率较低成为支持ICUD有利的依据。Chan等[8]报道的该中心ICUD术后输尿管狭窄的概率为3%, 体外术式狭窄的概率为7%, 也进一步证实ICUD输尿管和新膀胱吻合口并发症少于ECUD。Hussein等[6]通过分析26个研究中心的2 125例患者, 统计得出接受ICUD患者共1 094例, 而接受ECUD患者共1 031例, 分析严重并发症的发生率发现:ICUD组并发症发生率从2005年的25%下降到2015年6%, 每年下降2%(P< 0.001), 而ECUD组则从2006年13%维持于2015年14%(P=0.76)。进一步分析围术期资料显示:ECUD组手术时间较长(P< 0.001), 术中出血较多(P< 0.001), 术后输血较多(P< 0.001), 而ICUD组并发症发生率较高(P< 0.001), 且并发症分级Clavien Ⅲ ~Ⅴ 级分的较多(P=0.02), 其中30 d内并发症较多(P< 0.001), 再入院率较高(P< 0.001), 需要辅助化疗的较少(P< 0.001), 住院时间较短(P< 0.001), ECUD组肿瘤复发较多(P> 0.005)。除此之外, 我们还发现缩短手术时间的因素有高龄患者、术者经验的积累、行ICUD(外科医生预期高龄患者易发生并发症, 会潜意识加快手术速度), 而延长手术时间的因素有BMI、ASA评分及行原位新膀胱术。但是该研究可能存在偏倚的地方是ECUD组男性较多(P< 0.001), ASA≥ 3分的较多(P< 0.001), 术前新辅助化疗的较少(P< 0.001)。关于Studer原位新膀胱术术后并发症, Tyritzis等[9]通过对70例行RISON患者随访30.3个月(12.7~35.6个月), 统计得出并发症Clavien Ⅲ ~Ⅴ 级发生于30 d内的占31.4%(22/70), 发生于30 d外的占18.6%(13/70), Clavien所有级别90 d并发症总发生率为58.5%, Clavien< Ⅲ 级与Clavien≥ Ⅲ 级分别为21.4%(15/70), 37.1%(26/70), 两年的RFS、CS、OS分别为80.7%、88.9%、88.9%, 白天控尿率及性功能(包括男女)满意度维持在70%~90%。那么究竟ICUD患者术后效果如何呢?Satkunasivam等[10]通过比较行28例全腔内原位膀胱术患者与70例开放新膀胱术患者的尿动力学、肿瘤相关与HRQOL结果发现:前者剩余尿量更少, 而膀胱顺应性正常, 中位膀胱容量514 cm3; 膀胱癌指数问卷及排尿的困扰程度, 两者无差别; 虽然前者的尿垫大小及白天的潮湿度较差, 但是二者24 h尿垫的使用量无差别。总之, 机器人全腔内膀胱可获得很好的尿动力结果, 与开放术式相比肿瘤相关结果与HRQOL的结果无差别。近些年加速康复外科(enhance recovery after surgery, ERAS)逐渐兴起, 特别是对于根治性全膀胱切除, 其显著性效果多次被证实[11, 12]。但是在ICUD中的报道相对较少, Holzhauer等[13]自2010年行第一例机器人全腔镜下尿流改道术, 2013年开始引进ERAS理念, 共有108例ICUD患者, 其中71例通过ERAS康复, 37例择实施非ERAS, 统计发现ERAS在手术时间, 住院天数, 首次排便时间均体现出优势, 且两组并发症发生率无差别, 特别是ERAS组可完全不用肠外营养。
关于手术技巧, Desai等[14]分析来自2个研究中心的132例行机器人全腔内原位新膀胱术的患者资料, 该研究将开放手术的技巧与要点复制于机器人的腔内手术, 发现手术患者围术期的数据随着术者经验的积累而改善, 并总结手术要点包括:输尿管足够短, 轻柔的夹持输尿管, 使用精确、无张力、黏膜对黏膜吻合的no-touch技术。在此基础上, 我中心通过10例手术, 总结一些经验:对于肠道的处理要选择合适钉高和钉长的GIA, 对于新膀胱重建选用倒刺线行连续浆肌层的内翻缝合可减少新膀胱尿漏, 还要做好术后充分引流, 减少积液感染。进一步对比我中心手术患者的围手术期结果可发现, 手术时间短于文献报道的7.6 h, 且手术时间范围较为集中, 考虑是由于我中心均是由同一位术者完成手术。手术出血量少于文献中的430 mL, 淋巴结清扫个数少于文献报道的29个, 且我中心清扫淋巴结阳性率为0, 低于文献中的17%。30 d内发生并发症的例数及严重程度均好于文献报道, 30 d以外的并发症发生率高于文献报道, 但是相对严重程度较轻[14]。患者术后中位膀胱容量低于文献报道的514 mL(339~1 001 mL)[10], 这是因为文献中总共截取了60 cm的回肠缝制膀胱。上述结果表明, 我中心较为成功地开展了机器人全腔内studer原位新膀胱术。
我们认为全腔内原位新膀胱术之所以越来越被广泛接受和使用, 是因为具有以下优点:①更容易选择合适的肠段且定位更准确, 尿道肠管吻合张力小; ②切口减小(女性患者尤为明显, 基本接近于无创), 疼痛减轻, 切口相关并发症减少; ③减少肠道的暴露时间, 特别是肥胖患者, 肠道功能恢复快, 符合ERAS理念; ④术中出血少, 术后输血率低; ⑤输尿管和新膀胱吻合口并发症少; ⑥患者术后康复快, 为需要辅助化疗的患者赢取更多的时间。而其面临的主要问题是:①手术技术困难, 手术时间增加, 需要丰富的机器人手术经验; ②学习曲线中手术并发症发生率较高; ③手术费用增加。除此之外, 我们需要把握好禁忌证, Collins等[15]在研究中提出ICUD的绝对禁忌证有:前列腺尖部至尿道近端有肿瘤浸润; 肾功能受损血肌酐> 177 μ mol/L; 肝功能受损; 患有精神障碍或手部灵敏活动受损。而相对禁忌证有患有炎性肠病(Crohn's disease); 与尿失禁相关的外括约肌无功能; 反复的尿道狭窄史; 有腹部或患者盆腔的放疗史或有严重的疾病; 老年患者(> 80岁); 病态肥胖(BMI> 30 kg/m2)。
综上所述, 根据患者个体差异, 选择适宜的患者行机器人全腔内studer原位新膀胱术切口小, 疼痛轻, 并发症减少, 患者术后康复快, 通过适当锻炼后可获得较好的膀胱容量及尿动力结果, 可以改善患者行尿流改道术后的生活质量。随着微创技术的进一步发展, 伴随着ERAS理念的盛行, 机器人全腔内studer原位新膀胱术在手术技术及安全性方面可行, , 并且适应了微创时代的大潮流, 有着广阔的发展空间和应用前景。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|