




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
混合现实平台远程协作机器人微创手术1例报告
[朱捷1 , 沈诞1 , 刘启明2 , 单立松2 , 朱大庆2 , 王鹏超2 , 马鑫1 , 张旭1  ]
]
]
|
|


近年来, 移动互联网、物联网、影像辅助和人工智能(A.pngicial Intelligence, AI)飞速发展, 已经应用于生活的很多方面, 并在医学领域也逐步开始应用。影像辅助技术目前包括虚拟现实(Virtual Reality, VR)、增强现实(Augmented Reality, AR)和混合现实(Mixed Reality, MR)三类。在医学领域目前主要应用于影像资料的3D呈现、手术规划、医患沟通、术中导航、远程医疗以及医学培训等各方面[1]。近日, 我科室利用MR技术平台, 将MR技术、机器人微创手术、远程指导相结合, 成功完成了一例混合现实平台远程协作机器人经腹腔右侧腹膜后肿瘤切除术, 继2016年12月首次完成MR机器人微创手术术中导航应用后, 再次将此项技术应用于术中远程指导。现报告如下。
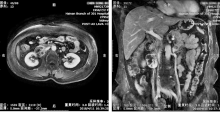
患者, 女, 65岁。因查体超声发现右侧腹膜后占位病变1周于2018年4月27日入住解放军总医院海南分院泌尿外科。入院时血压139/75 mm Hg(1 mm Hg=0.133 kPa), 心率76次/min, 既往无恶性高血压病史, 无腹部手术史。腹膜后核磁平扫加增强扫描示右侧腹膜后十二指肠后方可见类圆形稍长T1长T2信号, 大小为37 mm× 40 mm× 44 mm(左右× 前后× 上下), DWI上呈不均匀高信号, 边缘光滑, 增强扫描动脉期实性成分不均匀强化, 静脉期及延时期强化减低, 病灶中心可见斑片状无强化区, 肿块局部与十二指肠后壁分界欠清晰(图1)。MRI诊断腹膜后富血供占位, 考虑副神经节瘤可能性大。
 | 图1 MRI增强扫描 |
患者转入内分泌科行相关内分泌检查, 卧立位试验显示基础醛固酮水平不高(134.65 ng/L), 肾素活性(1.5 ng· ml-1· h-1)未被抑制, 立位4 h后, 醛固酮水平升高(208.65 ng/L), 立位肾素血管紧张素Ⅰ 比值(ARR)< 30, 排除原发性醛固酮增多症。血儿茶酚胺、甲氧基肾上腺类似物检查(肾上腺素、去甲肾上腺素、多巴胺)结果均未见异常, 排除功能性副神经节瘤或嗜铬细胞瘤。ACTH-F节律存在, 小剂量地塞米松抑制试验F< 50 nmol/L, 排除Cushing综合征。综合考虑为无功能瘤可能性大, 不除外静寂型副神经节瘤。
给予盐酸酚苄明30 mg/d并行2周扩容治疗, 患者血压稳定在140/80 mm Hg, 心率75次/min, 拟行机器人腹腔镜右腹膜后肿瘤切除术。考虑到患者病情复杂, 手术难度大, 拟请北京院本部专家给予指导, 经研究商定于2018年5月8日利用北京维卓致远公司的MR技术平台实施远程协作机器人手术。
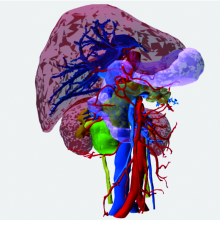
我们首先将患者的MRI影像应用星源平台快速制作出病灶及周边解剖的三维病例模型(图2), 并存储于星云MR云端协作平台; 再利用MicroSoft公司的HoloLens混合现实眼镜, 在MR技术星图平台支持下, 以虚拟人物加入的方式, 在北京和三亚两地间针对同一模型展开讨论, 制定相关手术方案, 我们认为肿瘤来自肾窦组织并膨胀生长, 肾动脉分支包绕肿瘤, 腔静脉受压, 术中应注意加强对肾脏血管和腔静脉的保护(图3)。
 | 图2 三维重建后的病例模型 |
 | 图3 利用星图平台两地进行术前讨论 |
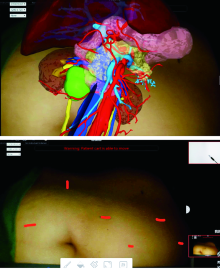
在医患沟通过程中, 我们佩戴HoloLens眼镜, 利用病例模型向患者及家属直观解释手术方案以及手术中可能出现的风险和并发症, 使医患合作与沟通更加顺利流畅(图4)。
 | 图4 利用MR技术进行医患沟通 |
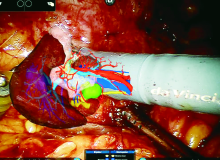
手术采用气管内插管全身麻醉, 患者麻醉成功后, 取左侧斜卧位, 常规消毒铺单。利用MR技术云平台星云, 建立三亚和北京之间同步手术视频。Trocar置入时, 术者佩戴HoloLens眼镜, 将病例模型在患者体表进行手动配准, 显示体内脏器及病灶的粗略位置, 北京端专家直接在视频中患者体表标记各Trocar部位, 术者通过混合现实眼镜可直接在患者体表看到标记并进行穿刺(图5)。Da Vinci工作台架设成功后, 术者取下HoloLens眼镜, 在机器人视野下完成手术。首先游离游离下降升结肠至腔静脉水平, 保护好十二指肠, 暴露后腹膜并打开后腹膜和肾周筋膜, 在肾脏下极位置游离出右侧输尿管及生殖静脉, 沿生殖静脉和输尿管向上游离至肾门附近, 发现肿瘤与肾脏、肾静脉、腔静脉、生殖静脉、输尿管等重要血管、脏器关系密切且有粘连, 北京端专家在术中参照病例模型, 结合术中视频, 直接在视频上标记出相关重要血管、脏器的部位, 形成AR视频画面, 并同步投射入术者的手术视野, 使术者在手术同时同步看到北京端的相关指导(图6), 与术者即时讨论并调整手术方案。在北京端专家的指导下, 沿肿瘤周边精细分离, 成功将肿瘤完整游离切除。手术过程中, 借助AR技术可将患者的病例模型投入到术者的视野中, 当术者遇到解剖确认时, 还可随时调取模型, 手动放大、旋转, 利用肾脏外形、腔静脉边缘解剖标志进行手动配准并参考比对, 以实现术中导航(图7)。
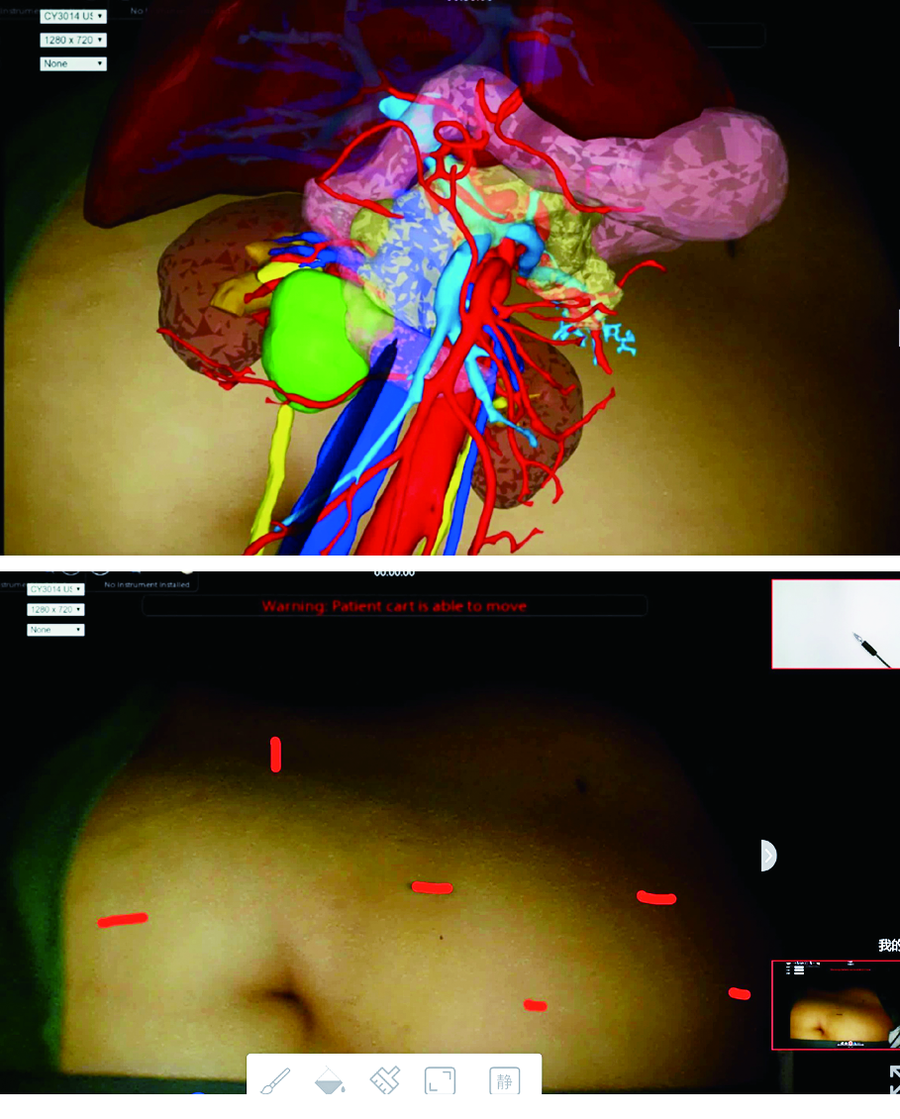 | 图5 MR技术标记Trocar位置 上图:HoloLens眼镜下配准病例模型; 下图:HoloLens眼镜下术者所观察的已标记的Trocar位置。 |
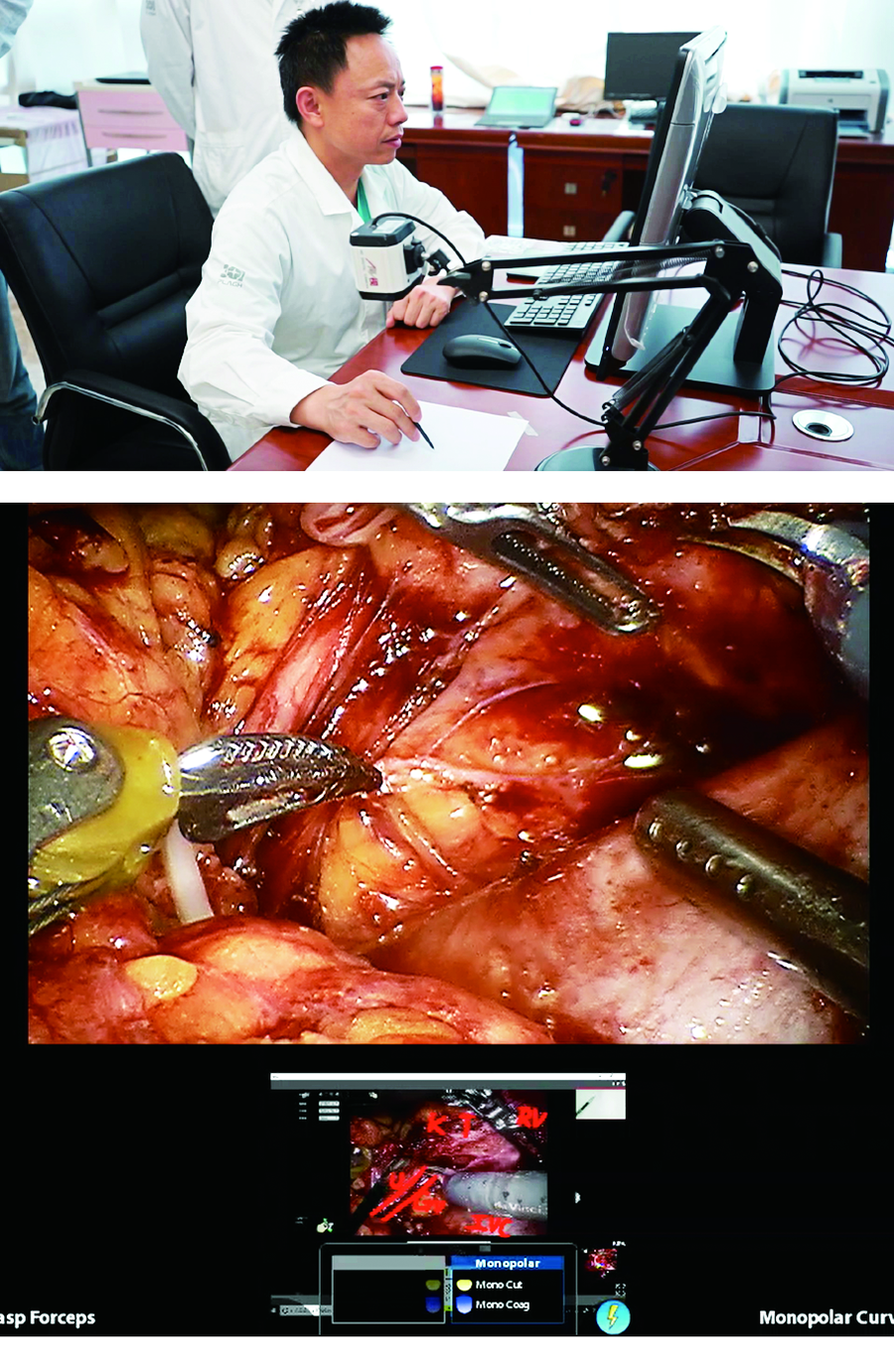 | 图6 术中远程协作完成手术 上图:北京端专家在星云平台支持下在同步手术视频上标记; 下图:北京端的术中指导被同步投射入术者的机器人视野。 |
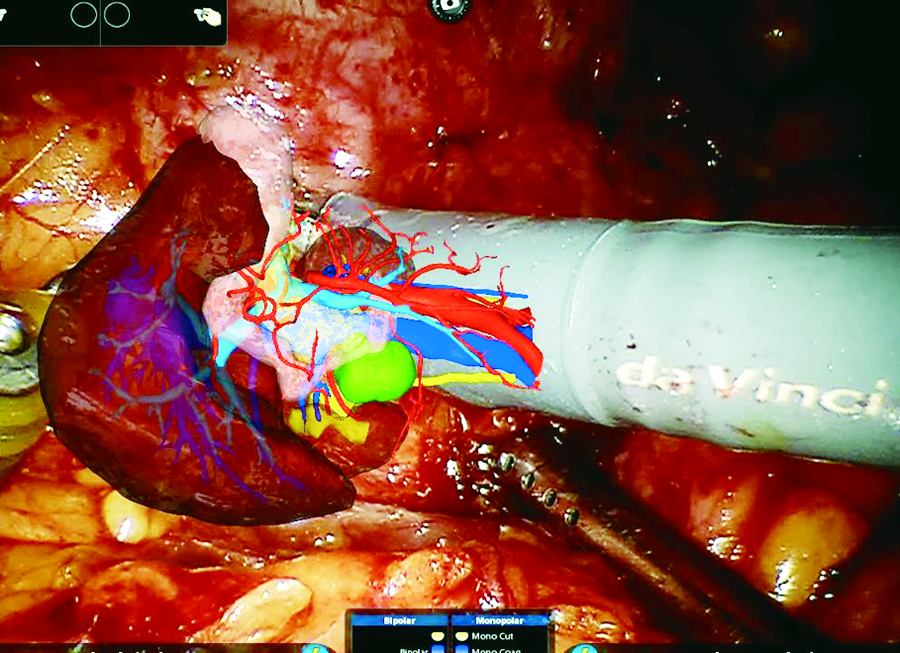 | 图7 术中病例模型被投射入术者视野可随时调取、观察 |
手术历时2 h 20 min, 出血20 ml, 肿瘤完整切除(图8)。术中患者未出现血压、心率波动, 术后患者生命体征平稳, 恢复良好, 于术后第7天顺利出院。切除肿瘤标本送病理检查, 诊断为右侧腹膜后平滑肌肉瘤, 包膜完整。
VR是由计算机生成的一种交互式三维动态视景和实体行为的仿真系统, 应用者所交互的是完全虚拟的环境; AR是将电脑虚拟的图像覆盖到真实世界画面中, 并在第三方媒介上形成交互; 而MR是利用可视设备, 在现实场景呈现虚拟场景信息, 在现实世界、虚拟世界和用户之间搭起一个交互反馈的信息回路, 以增强用户体验的真实感。
VR、AR技术的快速发展 , 为医学影像信息从传统的2D平面转化为更直观的3D立体呈现奠定了技术基础, 然而由于VR营造的是完全虚拟的环境, 除在医学培训或心理疾病康复之外的领域, 具有明显的局限性; AR技术尽管虚实结合, 但AR的交互是发生在第三方媒介上, 如iPad、智能手机、显示屏等, 不是真正意义的3D呈现方式[2, 3]。而MR技术通过合并现实和虚拟世界形成新的可视化环境, 是增强现实和增强虚拟的集合, 通过全息、立体的呈现方式, 打破了虚拟世界和物理世界之间的界限, 将虚拟三维模型引入和融合到使用者所看到的真实世界中, 使用者能够更为直观、全面的获得医学影像信息[4], 对提高医生的空间感知能力有很大的帮助, 可以减少医生在脑海中重新构建的难度、缩短构建的时间、不可避免产生的误差, 提高诊疗的效率。 目前MR技术在骨科、神经外科、口腔科领域应用于固定解剖的术中导航和术前规划, 但在腹腔内微创手术的应用, 特别是与机器人手术中的结合、远程交互, 本研究尚属首例。
MR技术巨大的发展潜力还在于广阔的外延性。MR技术与人工智能技术、导航技术、信息技术、机器人技术等均可以实现连接, 通过全息呈现方式不断创造出颠覆性的医学应用。在微创手术中, 传统的3D呈现方式受到平面的显示屏的限制和弱化[5], Da Vinci手术机器人的出现突破了这一瓶颈, 理论上MR技术的全息影像可完美的融入机器人视野, 但目前MicroSoft的HoloLens混合现实眼镜与Intuitive Surgery的Da Vinci手术机器人在3D呈现方式上不能兼容, 限制了MR技术的术中导航在机器人手术中的直接应用。但随着机器人视觉获取方式的改进和HoloLens眼镜的不断改进, 两者的兼容应指日可待。
MR技术和云技术的结合, 为医疗远程协作提供了新的技术平台。医学信息突破时空的限制, 不同地域的医学专家同时对同一模型或视频进行交流、标记和互动, 实现远程术前规划和术中指导。
目前MR技术在医学领域应用的瓶颈在于影像信息获取的精密程度和术中实时配准[6]。前者影响了信息的准确度, 特别是微细解剖的准确度; 后者影响了MR技术在精准手术中的应用效果; 前者依赖影像数据的精密获取, 后者人工智能追踪识别可能是有望解决的有效方案。
本次MR平台远程协作机器人手术, 是全球范围内首次利用MR技术实现远程协作的机器人微创手术, 本次手术的成功完成, 证实了MR技术在机器人微创手术和远程协作医疗中的可行性和优越性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|