








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
机器人辅助腹腔镜肾盂输尿管离断成形术的初步经验(附21例报告)
[周骏1 , 梁朝朝1  , 方卫华
, 方卫华1 , 邰胜1 , 王建忠1 , 杨诚1 , 施浩强1 , 郝宗耀1 ]
, 方卫华|
|

 , Fang Weihua
, Fang Weihua肾盂输尿管连接部梗阻(ureteropelvic junction obstruction, UPJO)是导致肾脏积水的常见原因之一, 有效的治疗方法为切除梗阻段, 并对扩张的肾盂进行整形。传统手术以开放为主, 但随着腹腔镜技术的开展, 腹腔镜肾盂输尿管离断成形术(laparoscopic pyeloplasty, LP)已有取代开放手术的趋势, 但手术难度较大, 时间较长。我院自2014年9月引进达芬奇手术机器人系统后, 迅速将其应用到肾盂输尿管离断成形术中, 充分发挥了其优势, 现报告如下。
回顾性分析我院2014年9月~2016年9月收治的21例UPJO患者的临床资料。其中男12例, 女9例, 年龄17~37岁, 平均25岁。左侧11例, 右侧9例, 双侧1例。因患侧腰痛就诊7例, 体检发现患肾积水14例, 所有患者术前均行超声检查, 15例行IVU检查, 5例行CT检查, 1例行MRI检查。其中15例进一步行逆行肾盂造影确诊。18例诊断为一侧肾脏UPJO, 1例诊断为双侧肾脏UPJO, 1例为右侧重复肾合并下位肾UPJO, 1例为左UPJO合并多发肾结石。
麻醉方法:患者采用气管插管+静脉复合麻醉, 桡动脉插管动态监测动脉压, 气管插管动态监测CO2分压。
体位:患者取健侧斜仰卧位, 腰部垫高, 头脚侧压低(图1)。
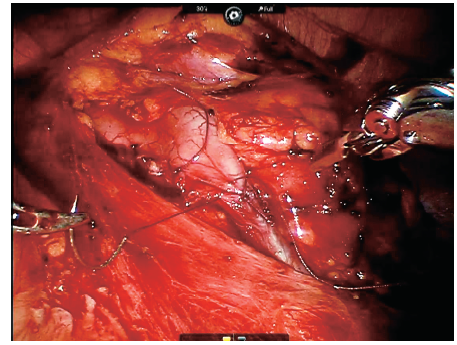
手术步骤:①选择脐部患侧为镜头臂穿刺点, 首先穿刺入气腹针, 充入CO2气体达1.729 kPa(13 mm Hg), 建立气腹, 再穿刺入12 mm Trocar, 置入腹腔镜后, 直视下在肋缘下2 cm和髂嵴上2 cm, 分别穿刺入8 mm机器人专用Trocar, 再在患侧下腹穿刺入12 mm Trocar为辅助孔, 最后以目标区为指引, 引导机器人床旁机械臂系统进入手术区, 将各机械臂与Trocar分别连接(图2); ②直视下分离腹腔粘连, 沿结肠旁沟切开侧腹膜, 进入腹膜后间隙, 分离出扩张的肾盂及输尿管, 暴露梗阻段(图3); ③梗阻段上方切开肾盂, 放尽尿液, 裁剪多余肾盂暂不离断, 于梗阻段下方斜行切开输尿管暂不离断, 并向下方剖开输尿管(图4); ④将输尿管最下端与肾盂最下端缝合一针后, 连续缝合输尿管和肾盂后壁, 然后离断输尿管和多余肾盂, 再连续缝合裁剪后的肾盂呈“ 漏斗状” (图5); ⑤利用置管器向输尿管内置入斑马导丝, 再沿斑马导丝置入双J管, 下至膀胱, 上至肾盂, 间断缝合输尿管与肾盂前壁(图6)。
 | 图2 机械臂与Trocar完成连接 |
 | 图3 暴露梗阻段 |
 | 图4 向下剖开输尿管 |
 | 图5 成形后的肾盂输尿管连接部 |
 | 图6 缝合肾盂及输尿管前壁 |
1例左UPJO合并肾结石患者, 在肾盂切开后, 联合膀胱电子软镜, 取出肾盏结石4枚(图7, 8), 再行离断成形。
所有手术均由达芬奇机器人腹腔镜辅助完成, 其中1例行双侧手术, 无1例中转开放或传统腹腔镜。手术时间65~110 min, 平均85 min, 术中出血10~30 ml, 平均18 ml, 术后引流管留置时间3~5 d, 平均4.5 d, 导尿管留置6 d, 住院时间5~8 d, 平均6.5 d。术后无一例发生尿漏, 双J管术后留置1~2个月, 予膀胱镜下拔除。
拔除双J管后1个月行B超检查, 术后6个月行IVU检查。21例患者术后拔除双J管后B超检查患肾积水明显减轻, 15例术后6个月行IVU检查显示患肾积水均明显减轻, 其中12例输尿管引流通畅, 3例延迟摄片后, 输尿管全程显影。
 | 图7 术前KUB及IVU显示左肾积水合并左肾多发结石 |
 | 图8 联合电子膀胱镜术中取石 |
UPJO是较为常见的泌尿外科疾病之一, 常导致肾脏积水和肾功能受损, 如不及时处理, 最终可能引起肾功能完全丧失。UPJO的病因较多, 有先天性狭窄、炎性狭窄、肾盂输尿管高位连接、动力性梗阻等, 其中以先天性狭窄最为常见。
对于UPJO的治疗, 传统主要以开放手术为主[1], 术式包括肾盂输尿管离断成形术(UPJ离断成形术)、肾盂输尿管Y-V吻合术[2]等, 其中UPJ 离断成形术既切除了病变段, 又对扩张积水的肾盂进行了整形, 最后将输尿管重新与肾盂缝合, 又称为Anderson-Hynes术, 手术效果最佳, 被作为标准术式[3]。随着腔镜技术广泛开展, 一些新的术式被应用, 如输尿管镜下钬激光狭窄段切开术、输尿管镜球囊扩张术、经皮肾肾盂成形术[4]、经皮肾肾盂切开术[5]等, 但手术效果报道不一。
自腹腔镜技术被应用到UPJO的治疗中后, 由于腹腔镜UPJ 离断成形术(laparoscopic pyeloplasty, LP)可以将开放的Anderson-Hynes手术完全复制到腹腔镜手术当中[6], 因此在微创手术中疗效最佳, 可以获得与开放手术相似的效果[7, 8]。但是, 此项手术在术中需要大量的镜下缝合操作, 因此手术的完成对手术医师的技能要求较高, 通常需要腹腔镜操作熟练的医师方可顺利完成。为了减小手术的难度, 尤其缝合的难度, 我们曾将3D腹腔镜技术应用于手术中, 利用其提供的高清立体视野, 对于手术中缝针的进针的角度和出针的方向, 都有较好的把握, 因此有利于手术难度的降低[9], 但是由于操作中仍使用长柄不可弯的普通腹腔镜器械, 因此手术难度没有得到根本的降低, 手术时间仍较长。
达芬奇手术机器人系统是目前世界上在临床使用中最先进的机器人系统, 已经广泛应用到泌尿外科的手术领域。达芬奇机器人的优势在于其既拥有高清立体的三维视野, 又具有7个自由度的极其灵活的机械臂, 其灵活度在局部操作甚至可以超越人的手腕, 而且手术时手术者可以在医生操控台上坐位操作, 大大减少了手术的疲劳感, 并且可以滤过人手在操作中细微震颤。因此, 达芬奇机器人十分有利于复杂的腹腔镜手术操作, 尤其适用于需要大量缝合操作的离断成形术, 优势明显[10]。
根据文献报道的RALP的手术效果, 与开放手术比较, 疗效相当, 而创伤更小[11]; 与传统腹腔镜手术比较, 则大大降低了腹腔镜手术的操作难度, 手术精细度更佳[12], 因此RALP也越来越被泌尿外科医师所接受[13]。而且机器人手术尤其适用于一些复杂的UPJO手术, 比如婴儿型UPJO[14]或第一次手术失败, 需二次离断成形术的患者[15]。对于使用经过改进的特殊器械的达芬奇机器人还被应用到单孔LP手术中, 有效地避免了器械的相互干扰, 获得较好的手术疗效和满意的美容效果[16]。
我们于2014年9月引进达芬奇手术机器人Si系统以来, 共完成21例RALP, 均顺利完成, 并获得一些体会:①由于达芬奇机器人的机械臂需要一定的空间方可灵活操作, 因此需要经腹途径完成, 而我们国内的后腹腔镜手术均为经腹膜后完成, 我们曾尝试1例RALP经腹膜后完成, 虽也可完成手术, 但由于空间较为狭小, 并且手术区域在肾下极水平, 非常不利于机械臂的展开, 导致机械臂与镜头臂之间的干扰, 无法充分发挥其操作灵活的优势。②经腹完成的RALP, 十分有利于肾盂的暴露, 尤其是扩张积水明显的肾盂, 对于肾盂的整形要优于经腹膜后途径, 可以进行充分的裁剪, 有利于手术成形。③由于达芬奇的机械臂要显著灵活于传统腹腔镜的直柄器械, 所以缝合的精细度要明显优于传统腹腔镜, 尤其是对吻合口的缝合, 可以采用5-0的可吸收线精准缝合, 既可避免术后狭窄, 又减少了术后尿漏的发生率。④要充分掌握达芬奇机器人的特点, 比如机器人缺乏触觉反馈, 手术者无法通过操作臂感受到分离、打结的力度, 因此有时会使缝线拉断, 或者打结过松, 这些均需要通过视觉反馈和手术经验加以弥补。⑤达芬奇机器人手术由于清晰度及精细度均优于传统腹腔镜, 因此手术难度要明显低于传统腹腔镜, 所以其手术时间要明显少于传统腹腔镜, 术后并发症也更少。
总之, RALP可以借助机器人立体视野和操作灵活的特点, 手术者坐位手术, 大大降低了LP的难度, 提高了其精细度, 因此手术效果良好, 将来有望取代传统开放及腹腔镜手术, 成为治疗UPJO的“ 金标准” 。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|