{kind=link}
机器人辅助腹腔镜腰大肌悬吊法输尿管再植术(附12例报告)
[刘圣圳1 , 罗光达2 , 吕香君1 , 艾青1 , 张旭1 , 董隽1  ]
]
]
|
|


目的 介绍12例机器人辅助腹腔镜腰大肌悬吊法输尿管膀胱再植术的方法和疗效。方法 回顾性分析2013年6月~2015年3月收治的12例输尿管下段狭窄并肾积水患者的治疗经验。12例中左侧10例,右侧2例,术前B超、静脉肾盂造影提示输尿管下端狭窄,输尿管扩张平均直径1.8(0.6~2.6)cm、肾盂扩张分离平均2.56(1.3~3.9)cm。所有病例均在机器人辅助腹腔镜下完成,并辅助使用膀胱腰大肌悬吊技术,其中3例行黏膜下隧道法输尿管膀胱再植术,9例行输尿管膀胱乳头法吻合术。结果 12例手术均成功,无中转开放。平均手术时间131(80~185)min,其中机器人定位时间平均25 min;平均出血量51(30~100)ml;术后引流管平均拔除时间为4.2(3~7)d,所有患者均无明显漏尿产生;术后尿管平均拔除时间为6.2(5~7) d,平均总住院时间7.8(5~9)d,术后双J管平均拔除时间为27.4(25~32)d。术后随访6~15个月,复查B超、静脉肾盂造影、膀胱造影,肾积水均明显减轻或消失,其中轻度肾积水2例,无明显肾积水10例,未见输尿管吻合口狭窄和输尿管反流。结论 机器人辅助腹腔镜腰大肌悬吊法输尿管膀胱再植术治疗输尿管下段狭窄安全可行、稳定可靠。
Objective: To introduce our technique and experience in 12 cases of robot-assisted laparoscopic ureteral reimplantation with method of psoas hitch and clinical outcomes.Methods: The clinic data of 12 patients with middle or distal ureteral stricture and hydronephrosis from June 2013 to March 2015 were analyzed retrospectively. Ten cases were in the left side and 2 cases in the right side. The middle or distal ureteral strictures were diagnosed with ultrasonography and intravenous urography angiography, with average diameter of 1.8 (0.6-2.6) cm in ureteral expansion and pyelectasis 2.56 (1.3-3.9) cm. All of the patients underwent robot-assisted laparoscopic ureteral reimplantation with psoas hitch procedure (submucosal tunnel ureteral reimplantation in 3 cases and ureteral nipple ureteralreimplantation in 9 cases).Results: All of the operations were performed successfully without conversions to open surgery. The mean operating time was 131 (80-185) min, including the preoperative set-up time of da Vinci surgical system about 25 min. The mean estimated blood loss was 51 (30-100) mL. The drainage tubes of all cases were removed 4.2 (3-7) days after surgery without urine leakage. The urinary catheters were removed 6.2 (5-7) days after surgery. The hospital stay was 7.8 (5-9) days. The double-J stents were removed 27.4 (25-32) days after surgery. During 6 to 15 months follow-up, ultrasonography and IVU showed mild hydronephrosis in 2 cases and no obvious hydronephrosis in 10 cases. There was no obstruction or vesicoureteral reflux in any case.Conclusions: Robot-assisted laparoscopic ureteral reimplantation with methods of psoas hitch is technically effective and reliable in treating middle or distal ureteral obstruction.
我们于2013年6月~2015年3月应用机器人辅助腹腔镜行输尿管膀胱再植术治疗输尿管下段狭窄12例, 取得稳定的疗效, 现报告如下。
本组患者12例, 男1例, 女11例, 年龄19~51岁, 平均37.7岁。左侧10例, 右侧2例。2例为全子宫切除术后, 2例伴同侧卵巢占位(妇科会诊后, 于机器人辅助腹腔镜下一并切除), 1例伴输尿管结石, 1例为腹膜后纤维化, 1例伴有泌尿系反复感染。患者主诉均有腰痛腰酸, B超、静脉肾盂造影、输尿管CT、输尿管镜均提示输尿管下端狭窄、上端输尿管扩张平均直径1.8(0.6~2.6)cm、肾盂扩张分离平均2.56(1.3~3.9)cm和肾积水(重度肾积水7例, 中度肾积水5例)。术前常规检查无手术禁忌证, 本组所有患者均通过尿脱落细胞荧光免疫杂交实验和输尿管CT除外输尿管肿瘤。
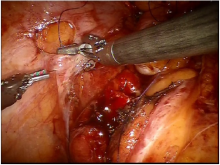
患者麻醉成功后取截石位, 术野常规消毒铺巾, 留置F16号导尿管。于脐上约2 cm逐层切开皮肤肌肉筋膜各层, 突破腹膜进入腹腔, 置入12 mm Trocar, 放入镜头, 直视下水平距镜头孔约8 cm处, 左右各置入一个8 mm Trocar, 分别作为da Vinci SI系统第1、2臂, 水平距患侧8 mm Trocar外8 cm置入8 mm Trocar作为da Vinci SI系统第3臂。患侧上腹腋前线处穿刺置入12 mm Trocar作为辅助通道。取头低脚高位倾斜45° , 将床旁机械臂手术系统移入位, 三臂与上述相应Trocar连接, 并分别置入镜头, 单级弯剪(2臂)、双极钳(1臂)、无创环钳(3臂)、吸引器及辅助器械。找到患侧髂血管, 沿输尿管走行方向向内下方分离, 游离膀胱前壁及两侧壁, 显露腰大肌(或腰小肌肌腱), Hem-o-lok夹夹于输尿管病变近膀胱端, 剪除所见输尿管下段狭窄段及包含息肉或结石的增厚段, 病变段输尿管送病理, 使用辅助第3机械臂协助充分暴露悬吊部位, 2-0可吸收薇荞线将膀胱肌层固定于腰小肌肌腱或腰大肌肌腱, 将膀胱固定悬吊于腰大肌(图1)。
3例黏膜下隧道法(Lich-Gregoir技术)膀胱输尿管再植术具体步骤如下:膀胱注水200 ml形成半充盈状态, 于膀胱侧壁外上方切开膀胱肌层
3~4 cm, 向两侧钝性分离肌间沟显露膀胱黏膜。输尿管无扭曲无张力的情况下, 用3-0可吸收线将输尿管和膀胱黏膜于腹侧边缘间断缝合2针。沿缝合处膀胱黏膜做一大小与输尿管管腔相近的切口, 吸干流出液体, 将输尿管断端与腹侧膀胱黏膜间断吻合, 留置双J管, 将其下端进入膀胱内, 上端放入肾盂, 同样方法间断缝合背侧。用4-0可吸收线缝合膀胱肌层与输尿管外膜, 包裹吻合口形成输尿管隧道。
9例乳头法(膀胱外直接插入)手术步骤如下:将输尿管纵形剖开约1 cm, 用4-0可吸收线将输尿管壁外翻间断缝合呈乳头状。留置双J管, 上端放入肾盂。电刀切开膀胱全层3~4 cm, 将已置入双 J 管的输尿管乳头端插入膀胱内约1 cm, 用2-0可吸收线缝合膀胱全层与输尿管肌层。
膀胱内注水200 ml后吻合口无渗漏, 检查术野无活动性出血, 清点器械敷料无误, 于患侧下腹部穿刺引出引流管并丝线固定, 放出CO2气体, 拔除各机械手臂及Trocar。逐层缝合肌肉、皮下、皮肤, 无菌敷料覆盖伤口。
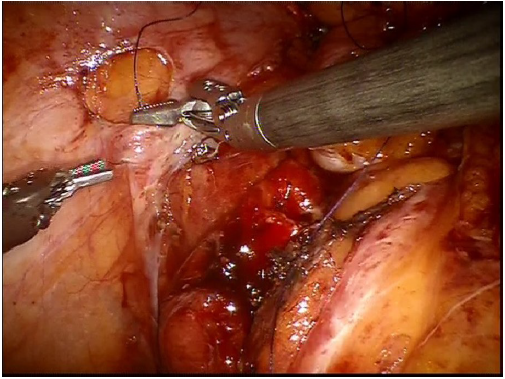 | 图1 腰大肌悬吊固定 |
12例手术均成功, 无中转开放。平均手术时间131(80~185)min, 其中机器人定位时间平均25 min; 平均出血量51(30~100)ml。术后引流管平均拔除时间为4.2(3~7)d, 无漏尿产生。术后尿管平均拔除时间为6.2 (5~7) d, 总住院时间7.8(5~9)d, 术后双J管平均拔除时间为27.4(25~32)d。术后随访6~15个月, 复查B超、静脉肾盂造影、膀胱造影, 肾积水均明显减轻或消失, 其中轻度肾积水2例, 无明显肾积水10例, 未见输尿管吻合口狭窄和输尿管反流。术后病理诊断5例为炎症细胞浸润, 7例为子宫内膜腺体。
预防输尿管膀胱再植术后吻合口狭窄及反流一直是泌尿外科医生致力解决的问题, 目前抗反流技术主要有乳头法、黏膜下隧道法(Lich-Gregoir技术和Politano-Leadbetter技术及其改良)、Cohen法等[1]。本组3例行黏膜下隧道法输尿管膀胱再植术, 9例输尿管膀胱乳头法吻合术, 两种术式具有不同的抗反流机制:前者为输尿管同膀胱黏膜的吻合, 关闭膀胱肌层后形成一段输尿管黏膜下的潜行隧道, 当膀胱充盈时, 隧道部位输尿管受压, 阻止膀胱内尿液反流; 后者形成的乳头游离在膀胱内部, 当膀胱充盈时内压增加, 游离的输尿管管壁四周受压不均匀, 管腔倒向一侧从而阻止膀胱内尿液的反流。在机器人辅助腹腔镜下黏膜下隧道法涉及输尿管与膀胱黏膜吻合, 操作难度大于乳头法且有造成术后回缩狭窄的潜在可能, 要求术者吻合时控制张力并保护周围血运, 两者机器人下抗反流效果的对比仍需更大的样本量支持。
腰大肌悬吊技术(Psoas hitch)常用于输尿管狭窄段较长病例(> 3 cm), 可处理长度小于10 cm的狭窄或损伤, 膀胱壁瓣技术(Boari-flap)联合应用腰大肌悬吊技术可处理长度小于15 cm的狭窄或损伤, 改良S型裁剪膀胱瓣技术可处理损伤或狭窄最长20 cm的狭窄或损伤, 回肠代输尿管法适用病变长度较广, 但存在操作复杂, 手术并发症多等诸多不足。本组12例患者输尿管病变均较长5.6(3~9)cm, 在机器人辅助腹腔镜下均加用了腰大肌悬吊技术, 有效的解决了输尿管病变长度切除过长导致的张力问题, 本术式要点如下:①充分游离膀胱, 分离Retzius间隙, 显露膀胱顶部、前壁和两侧壁, 预留足够的悬吊空间。②游离输尿管时应保护其血运, 提供合适长度和活动度的输尿管即可, 游离膀胱和显露腰大肌时对骨盆静脉丛和生殖股神经进行一定的保护。③缝线需选择可吸收线, 避免远期对膀胱和腰大肌的持续刺激。④优先选择腰小肌肌腱悬吊, 若存在腰小肌变异缺失, 则行腰大肌肌腹悬吊。国外学者也报道了此法对于治疗输尿管低位狭窄安全有效[2], 我们结合以往普通腔镜手术下的经验, 推荐采用此法处理病变10 cm以内的损伤或狭窄[3]。
传统的开放输尿管再植术的成功率95%~99%, 一直被认为是此类手术的“ 金标准” 。但传统开放手术术后血尿和膀胱痉挛等并发症的发生率均较高[4]。Reddy与Ehrlich在1994年分别报道了膀胱外途径腹腔镜输尿管再植术, 腹腔镜下输尿管再植以其创伤小、出血少、术后恢复快、无明显尿漏等优势逐渐取代开放手术, 但也存在对操作者腔镜技能要求高、手术耗时相对较长、容易损伤神经血管等问题[5]。相对于传统腹腔镜和开放手术, 达芬奇机器人辅助腹腔镜系统的优势包括3D视野、更加精细的解剖分离、更为简便的缝合技术、更短的住院时间和更快的身体恢复, 不足之处在于更长的手术时间和更高的费用[6]。多名研究者发现机器人辅助腹腔镜下输尿管再植疗效安全可靠, 术后并发症发生率与传统手术相近甚至更低[7~10]。Casale等[11]报道了41例在机器人辅助腹腔镜下经腹膀胱外途径行输尿管膀胱吻合术, 机器人灵巧的机械手臂可以在操作时避免损伤骨盆神经丛, 传统开放手术和普通腹腔镜很难做到。保留骨盆神经丛有助于减少术后输尿管反流和尿潴留等状况的发生, 特别在同时处理双侧输尿管时机器人系统更具优势。本组12例患者术中均充分发挥了机器人灵活的机械手臂和高清视野优势, 保留周围神经和血供, 达到了减少创伤和精确吻合的目的, 术后未出现相关手术并发症。远期并发症仍需增加病例数和持续随访观察。机器人辅助腹腔镜作为一种新型器械应用于此类复杂手术中, 应保持严谨和怀疑的态度, 严控相关术中和术后并发症。
机器人辅助腹腔镜输尿管膀胱再植术具有解剖精确、创伤小、操作简便、可同时处理双侧输尿管等诸多优势, 疗效同传统开放手术和腹腔镜手术基本一致, 无明显并发症, 缺点在于成本仍较高。随着机器人辅助腹腔镜手术成本的降低和术者操作熟练程度的提高, 机器人辅助腹腔镜手术有望成为输尿管出口疾病的首选方案。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|