
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
机器人辅助后腹腔镜肾部分切除术(附21例报道)
[黄双, 吕香君, 张旭 ]
]
]
|
|


目的 总结机器人辅助后腹腔镜肾部分切除术(RARPN)的临床经验和疗效。方法 回顾性分析2014年6~12月接受RARPN的21例患者的临床资料。患者年龄47~71岁,中位年龄57.2岁,体质指数(BMI)20.3~28.1 kg/m2,中位数22.6 kg/m2。其中左肾肿瘤9例,右肾肿瘤12例。肿瘤最大径2.5~5.4 cm,中位数3.7 cm。对术中估计失血量、热缺血时间、手术时间、术后切缘病理及术后并发症情况进行统计分析。结果 21例手术均成功完成,无一例中转开放手术。手术时间50~80 min,平均65 min,术中失血量70~150 ml,平均90 ml,均未输血;术中阻断肾动脉热缺血时间10~23 min,平均16 min;术后留置引流管2~4 d,平均3 d,拔除引流管后即可下床活动;术后病理均为透明细胞癌,其中Furhman分级Ⅱ级18例,Ⅱ~Ⅲ级3例,所有切除肿瘤均无阳性切缘。无严重术中、术后并发症发生。短期随访1~10个月,平均5个月,无死亡及疾病进展发生。结论 对于有机器人和后腹腔镜手术经验的外科医生来说,RARPN是安全可行的,该手术为可行肾部分切除术的患者提供了一种可选择的有效的微创方法。
Objective: To investigate the safety and feasibility of robot-assisted retroperitoneal laparoscopic partial nephrectomy (RARPN).Methods: A retrospective study on 21 RARPNs, from 2014 June to 2014 Dec, was performed in our hospital. The median age of these patients was 57.2 years old (47-71 years old), and the body mass index (BMI) was 22.6 kg/m2 (20.3-28.1 kg/m2). The left renal tumors were seen in 9 cases, and right in 12 cases. The median maximum tumor diameter was 3.7 cm (2.5-4.4 cm). The complications, estimated blood loss, warm ischemia time, operative time and positive margins were assessed.Results: All 21 cases were subjected to RARPNs successfully, and no cases were converted to open surgery. The operative time was 65 min (50-80 min), and estimated blood loss was 90 mL (70-150 mL). There was no blood transfusion. Median warm ischemia time was 16 min (10-23 min). Postoperative drainage time was 3 days (2-4 days). Pathologically postoperation, all cases were diagnosed as having clear cell carcinoma, including 18 cases of Furhman grade Ⅱ, and 3 cases of grade Ⅱ-Ⅲ. No positive margins were seem. No serious intraoperative, and postoperative complications occurred. During a short-term follow-up period (1 to 10 months), there were no death and disease progression.Conclusions: The RARPNis safe and feasible, and provides an alternative minimally invasive method for resection of renal cell carcinoma.
随着泌尿系统超声、CT、MRI等现代诊断技术的不断进步, 多数肾癌被偶然发现, 而偶发性肾癌与症状性肾癌相比, 预后更好。对于肾脏良性肿瘤和体积较小的肾癌行肾部分切除术已成为标准选择。最早的后腹腔镜肾部分切除术(RLPN)是由Gaur等[1]于1993年完成的, 因其周围毗邻结构简单、对腹腔脏器干扰小, 更容易暴露和阻断肾动脉, 因此在国内应用比较广泛。近年来随着机器人辅助手术系统(da Vinci系统)的出现, 使用机器人辅助腹腔镜行肾部分切除术的报道显著增加, 由于经腹途径能够提供较大的操作空间可有效避免机器人手臂之间的碰撞, 因此这些报道多采用经腹途径。但对于以往习惯了腹膜后手术的医生来说由于腹腔解剖相对陌生, 需要重新适应, 因而延长了学习曲线。而且对于位于肾脏背侧的肿瘤, 经腹腔途径实施手术需要将肠管向健侧游离后再将肾脏完全游离并向中间翻转, 延长了手术时间, 增加了手术难度, 术后肠道功能恢复慢, 肠道并发症发生率提高。因此, 我们对已成熟的后腹腔镜技术与机器人辅助腹腔镜系统结合进行了尝试。2014年6~12月我们共开展21例机器人辅助后腹腔镜肾部分切除术(Robot-assisted retroperitoneal partial nephrectomy, RARPN), 均成功实施。现将结果报告如下。
2014年6月~2014年12月共收治21例患者, 其中男14例, 女7例, 年龄47~71岁, 中位年龄57.2岁。体质指数(BMI)20.3~28.1 kg/m2, 中位数22.6 kg/m2。术前均行双肾MRI平扫加增强检查, 其中左肾肿瘤9例(42.9%), 右肾肿瘤12例(57.1%)。肿瘤位于背侧18例(85.7%), 腹侧3例(14.3%)上极2(9.5%), 中极14(66.7%), 下极5(23.8%)。肿瘤最大径2.5~5.4 cm, 中位数3.7 cm, 以4 cm为界, ≤ 4 cm 15例(71.4%), > 4 cm 6例(28.6%)。所有病例术前均未发现局部浸润或远处转移。21例患者中6例(28.6%)有腹腔手术史。
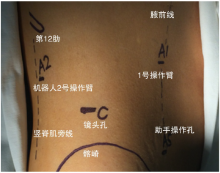
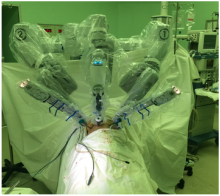
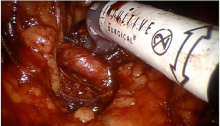
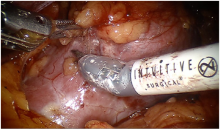
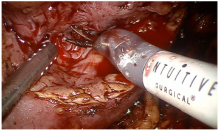
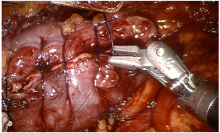
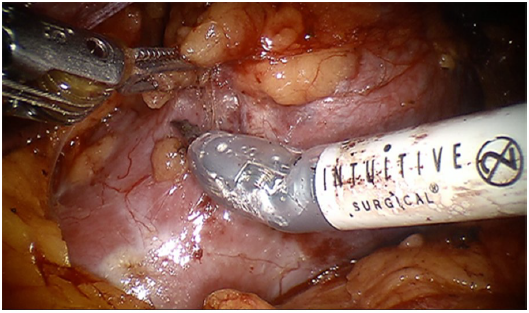
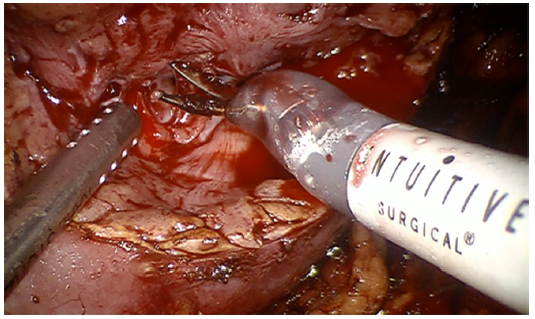
21例患者均行机器人辅助后腹腔镜肾部分切除术, 手术均为同一术者完成。全麻成功后取完全健侧卧位, 升高腰桥, 使髂嵴和第12肋之间的空间尽量展开。消毒术野皮肤, 铺无菌巾单。标记第11、12肋、髂嵴、竖脊肌、腋前线、锁骨中线等体表标志。首先选取髂嵴上2 cm处作20 mm横切口, 此切口作为机器人镜头孔, 以Kelly钳逐层钝性分离皮下组织、筋膜直至进入腹膜后腔。以示指钝性扩大腹膜后腔, 将腹膜向腹侧推移。置入自制手套气囊注气600~800 ml, 继续扩大腹膜后腔。以12肋缘下与髂嵴连线中点为机器人1、2臂水平位置。以右侧为例, 1臂位于锁骨中线与该连线交点, 2臂位于竖脊肌旁切迹与该连线交点, 分别切开8 mm左右切口。髂嵴上切口置入12 mm Trocar, 放入0° 镜, 于直视下使用吸引器进一步钝性推开腹膜, 并分别置入两个8 mm Trocar。建立以镜头孔为顶点的钝角三角形关系, 以便让机械臂可以充分活动并避免发生碰撞。最后在镜头直视下, 以吸引器轻轻钝性向腹侧推开腹膜, 于机器人器械1臂操作孔下方7~8 cm处放置12 mm Trocar作为助手操作孔。da Vinci机器人位置正对患者头部, 位于两机械臂中点至镜头孔的连线上(图1~3)。连接镜头臂和器械臂, 置入30° -down机器人镜头, 在镜头直视下于1号机器人臂置入单极弯剪, 2号机器人臂置入双极Maryland钳。手术过程同后腹腔镜手术, 清理腹膜外脂肪, 打开侧锥筋膜, 打开肾周脂肪囊, 显露肾脏及肿瘤, 由腰大肌表面向内侧于肾中极水平分离肾蒂, 显露肾动脉后阻断, 沿肿瘤边界切除肿瘤, 再以1-0 Quill线缝合肾脏创面(图4~7)。最后由辅助孔取出标本送病理检查, 腹侧机器人操作孔放置F15粗乳胶管引流。检查无活动出血, 缝合各切口, 手术结束。
 | 图1 患者体位 完全侧卧位并升高腰桥 |
 | 图2 体表标志及Trocar布置(右侧) |
 | 图3 机器人位置 |
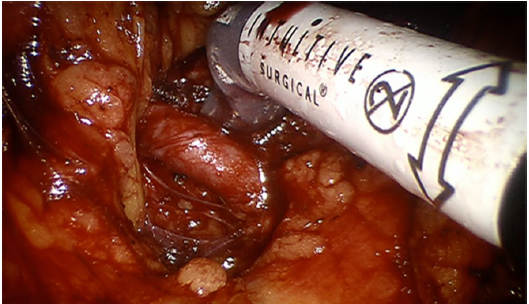 | 图4 游离肾动脉 |
 | 图7 缝合肾脏创面 |
21例手术均成功完成, 无一例中转开放手术。手术时间40~70 min, 平均50 min, 其中腹膜后空间建立用时8~15 min, 平均10 min, 穿刺套管及放置机器人手臂用时3~8 min, 平均5 min, 腔内手术时间30~45 min, 平均35 min, 术中阻断肾动脉热缺血时间10~23 min, 平均为16 min。术中估计失血量40~100 ml, 平均60 ml, 均未输血; 术后留置引流管, 术后住院2~4 d, 平均3 d, 拔除引流管后即可出院。术后病理均为透明细胞癌, 其中Furhman分级Ⅱ 级18例(85.7%), Ⅱ ~Ⅲ 级3例(14.3%), 所有切除肿瘤均无阳性切缘。集合系统损伤1例(4.8%), 腹膜破裂2例(9.5%), 皮下淤血2例(9.5%), 轻度腰痛5例(23.8%), 发热1例(4.8%), 无尿瘘、肾功能不全、气胸等, 无严重术中、术后并发症发生。随访1~10个月, 平均5个月, 无死亡及疾病进展发生。
随着机器人手术在泌尿外科的广泛开展, 机器人辅助腹腔镜手术在治疗肾肿瘤方面的疗效不断被证实, 同开放手术及传统腹腔镜手术相比, 不仅疗效相当, 且具有更多优势[2]。尤其对于肾部分切除手术, 腹腔镜手术对术者的技术要求较高, 学习曲线长, 而在这种复杂的重建和高级的切除手术中, 机器人可为术者提供3D视觉、7个活动度的仿腕型器械、移动缩放和减少震颤。简化了手术操作, 缩短了学习曲线[3~4]。机器人辅助腹腔镜肾部分切除术, 目前多采用经腹腔入路。在腹腔内操作空间大, 解剖标志清楚, 但是需要充分游离肾周围脏器以显露操作部位, 有损伤肠道、大血管、肝脏、胰腺等脏器的潜在风险。并且经腹腔入路更适合位于腹侧的肾肿瘤, 而对于背侧肿瘤, 尤其是背侧上极肿瘤的切除则较困难, 往往需要将肾脏完全游离后向内侧翻转以显露肿瘤。对于有腹腔手术史或腹膜炎病史的患者, 往往腹腔内粘连严重, 增加了经腹手术的难度和风险。另外, 在我国肾部分切除术多采用后腹腔镜的手术方式, 多数泌尿外科医生对后腹腔解剖比较熟悉, 而对腹腔解剖还相对陌生。可见机器人后腹腔镜技术是具有应用价值的。相对于经腹入路的机器人辅助腹腔镜肾部分切除术, 后腹腔入路能够更快的显露肾动脉及肾背侧的肿瘤, 缩短了手术时间, 并且后腹腔肾脏相对孤立, 分离显露更容易, 减少了其他脏器损伤的风险。有丰富经验的单一术者手术研究发现, 在相近的肿瘤大小及手术难度病例中, 机器人辅助腹腔镜经腹腔肾部分切除术出血较后腹腔手术多, 可能是由于经腹腔手术, 下腔静脉受腹腔内气体压力导致静脉回流受阻所致。因此在较大肾肿瘤部分切除术, 经腹腔途径有时需要同时阻断肾动脉和肾静脉来减少出血。这既增加了手术难度, 也增加了肾功能损伤及手术并发症的发生。
以往认为肿瘤部位是选择经腹入路或后腹腔入路的重要因素之一, 但本报道的病例中有1例患者因既往有腹膜炎开腹探查的病史, 2例有其他腹腔手术的病史, 此3例肿瘤均位于肾脏腹侧中极, 我们选择后腹腔入路, 借助于机器人手臂灵活的自由度, 从肿瘤显露到切除、缝合肾脏, 手术难度并未增加。而同时切除肿瘤精准, 减少了阳性切缘以及术后尿瘘的发生。对于肾脏上极的肿瘤, 我们可以通过改换0° 镜头, 或者适当上移镜头孔Trocar位置来充分显露。对于肾下极的肿瘤, 以往在后腹腔镜下操作, 肿瘤切除后的缝合非常考验术者的持针及缝合技巧, 明显延长了热缺血时间, 但是在机器人手臂的辅助下, 缝合过程快速简单, 体现出了机器人手术平台的显著优势。
通过21例RARPN术的经验积累, 我们认为术者无需象传统行后腹腔镜时的侧身弓型体位, 整个手术操作舒适简单快速, 术野清晰, 操作空间大。术野是中国泌尿外科医生最熟悉的腹膜后的解剖结构, 肾动脉容易寻找及控制, 机器人单极电剪分离肾周组织效率明显优于腹腔镜下的超声刀。手术时间明显缩短, 出血量明显减少, 缝合时间, 尤其是热缺血时间同现有报道[5]的后腹腔镜手术相比明显缩短, 这对患者肾功能的保护意义重大。腹膜后腔的建立是手术成功与否的关键, 在向腹侧分离推开腹膜的过程中要避免损伤腹膜, 一旦损伤腹膜可以采用Hem-o-lok夹夹闭破口, 视情况于肋缘下插入气腹针于腹腔内, 放出腹腔内气体, 并注意有无腹腔脏器的合并损伤。
本次报道的21例RARPN, 均为同一术者完成, 具备丰富的后腹腔镜手术的经验, 证实RARPN安全有效, 至于能否大规模推广, 还需更多病例并作长期随访的对比分析。同时通过总结这些手术也显示出机器人辅助腹腔镜后腹腔入路手术存在的问题需要后续改进:①对于身材瘦小的患者, 腰部穿刺器可布置的空间狭小, 导致术中机器人手臂频繁碰撞, 需要频繁调整手臂后才能到位; ②对助手要求较高, 避开机器人手臂对助手的影响, 适应手术视野的方向, 术中如果遇到比如腹膜损伤, 肾动脉阻断不全等情况需要助手冷静熟练配合术者解决; ③机器人手臂Trocar和镜头Trocar位置可根据患者体型和肿瘤位置进行上下微调; ④后腹腔建立至关重要, 要避免损伤腹膜, 为手术尽量争取空间。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|