
{kind=link}
{kind=link}
机器人辅助腹腔镜肾部分切除术的学习曲线
[谢永鹏, 马鑫, 李宏召, 王保军, 史涛坪, 张瑜, 艾青, 黄庆波, 范阳, 高宇, 李新涛, 陈路遥, 明少雄, 张旭 ]
]
]
|
|


目的 探讨机器人辅助腹腔镜肾部分切除术的学习曲线。方法 比较同一外科医生施行的早期20例机器人辅助腹腔镜肾部分切除术和最近20例腹腔镜肾部分切除术的围手术期结果。所有手术在2013年5月~ 2013年8月完成。既往该医生成功施行1 000余例腹腔镜肾部分切除术和300余例机器人辅助腹腔镜根治性前列腺切除术。比较2种术式的手术时间、热缺血时间、出血量、切缘阳性率、术后住院时间、围手术期并发症发生率。结果 2组患者术前临床资料和肿瘤病理学结果的比较差异无统计学意义( P>0.05)。2组均无切缘阳性病例。2组手术出血量、术后住院时间、围手术期并发症发生率差异无统计学意义( P>0.05)。在机器人辅助腹腔镜肾部分切除术的学习曲线中,手术时间和热缺血时间均呈下降趋势。经过早期9例手术后,机器人辅助腹腔镜肾部分切除术的平均手术时间即可接近最近20例腹腔镜肾部分切除术的平均手术时间。前9例机器人辅助腹腔镜肾部分切除术的平均手术时间是134 min,热缺血时间是20 min,远远长于后11例机器人辅助腹腔镜肾部分切除术平均手术时间107 min,热缺血时间14 min。结论 一个资深腹腔镜外科医生从腹腔镜肾部分切除术到机器人辅助腹腔镜肾部分切除术过渡是一个非常迅速的过程,经过前9例机器人辅助腹腔镜肾部分切除术后,行机器人辅助腹腔镜肾部分切除术和腹腔镜肾部分切除术的手术时间大致相同。2组热缺血时间、手术出血量、术后住院时间、手术出血量、术后住院时间、围手术期并发症发生率差异无统计学意义( P>0.05)。
Objective: To discuss the learning curve of Robot-assisted laparoscopic partial nephrectomy(PALPN).Methods: We compared the perioperative outcomes of the first 20 patients who underwent RALPN to the latest 20 patients who underwent LPN performed by the same surgeons. All surgical operations ere done Between May 2013 and August 2013. The surgeons had completed more than 1 000 cases of LPN and more than 300 cases of robot-assisted laparoscopic radical prostatectomy. The learning curve was defined as the number of cases required to proficiently perform RALNP with shorter average operative time (OT) and warm ischemia times (WIT) , as compared to the latest 20 patients subject to LPN.Results: The two groups had comparable preoperative demographics and tumor histopathology. No patients in either group had a positive surgical margin. There was a downward trend in both OT and WIT during the RALPN learning curve. After RALPN for the first 9 cases, the average OT reached that of the last 20 cases subject to LPN. The average OT and WIT of the first 9 cases subject to RALPN werepatients 134 min and 20 min,compared with those of 107 min and 14 min of the last 11 cases subject to RALPN.Conclusions: The transiion from LPN to RALNP is rapid in an experienced laparoscopic surgeon. There were no significant differences in WIT, blood loss,or length of hospital stay between LPN and RALPN. RALPN achieved a similar OT as LPN after 9 procedures.
机器人手术系统为外科医生提供了超越人手和普通腹腔镜器械所能达到的更好的灵活性、精确性及可操控性。拥有三维视野、多关节的内手腕机械装置(全自由度关节), 符合人体工程学的手术操作台, 使得微创手术更加完美, 已逐渐成为国际上治疗肾脏T1期肿瘤主要术式, 在国内该术式尚处于起步阶段。本文回顾分析我院2013年5月~ 2013年8月由同一医师完成的20例机器人辅助腹腔镜肾部分切除术, 探讨机器人辅助腹腔镜肾部分切除术的学习曲线[1]。
本组20例, 男16例, 女4例, 年龄39~72岁, 平均58岁。全部患者均为健康体检发现, 无其他不适症状。术前影像学检查(超声、CT、MR)诊断为T1期肾癌, 肿瘤位于左肾9例, 右肾11例, 其中位于肾上极6例, 中极10例, 下极4例, 均呈外向型生长。肿瘤直径0.8~6.0 cm, 平均2.9 cm。肾肿瘤包膜完整。
麻醉起效后, 患者取健侧斜卧45° 体位, 术野常规消毒铺巾, 留置F14号导尿管。用记号笔标记出患侧肋缘及锁骨中线, 于患侧距脐2 cm处作一长约12 mm纵形皮肤切口标记为镜头孔, 患侧肋缘下约6 cm锁骨中线稍内侧处作一长约8 mm切口标记为第1机械臂臂孔, 以镜头孔为等腰三角形顶点, 于患侧下腹锁骨中线稍外侧作一长约8 mm切口标记为第2机械臂臂孔, 第1、2机械臂臂孔距镜头孔间距相等, 并于第1臂孔内侧约4 cm处作一5 mm切口标记为第一辅助孔, 于镜头孔下方约4 cm处作一5 mm切口标记为第二辅助孔。按标记线切开镜头孔处皮肤及皮下组织, 以Hasson法将12 mm Trocar置入腹腔, 注入CO2气体, 保持气腹压14 mm Hg(1.862 kPa)。自镜头孔Trocar手动放入镜头, 切开各标记处皮肤, 皮下组织, 镜头观察直视下将不同Trocar置入上述各位点, 将床旁机械臂手术系统移入位, 三个臂与上述相应Trocar连接, 并分别置入镜头、单极弯剪(1臂)、双极钳(2臂), 辅助孔内置入吸引器及肠钳等辅助器械。镜下观察解剖标志, 打开患侧腹膜及脾结肠韧带, 将患侧半结肠向内侧牵开, 在后腹膜与肾周筋膜间隙分离, 纵行切开肾周筋膜, 打开肾周脂肪囊, 沿肾表面依次锐性分离肾脏腹侧、下板、上极和背侧, 游离显露出肾脏肿瘤, 游离肾动脉, 用无损伤“ 哈巴狗钳” 钳夹、阻断肾动脉, 用剪刀沿肾肿瘤边缘(约0.5 cm处)剪开肾实质, 逐步剪向深部, 将肿瘤完整切除。用可吸收带倒钩线分2层缝合肾创面.缝线拉紧后均用Hem-o-lok夹固定。去除“ 哈巴狗钳” 钳夹。观察创面无明显出血。置入取物袋, 将标本放入取物袋取出。仔细检查并止血至无活动出血。清点器械、纱布无误, 拔除所有Trocar, 分别缝合切口, 手术结束。
手术时间定义为从开始建立气腹到缝合皮肤结束为止(不包括术前机器人准备时间)。切缘阳性定义为切除标本的墨染表面存在癌细胞。
本组20例手术均获成功, 无一例转换术式。肿瘤直径0.8~6.0 cm, 平均2.9 cm; 手术时间(不包括术前机器人准备时间)80~180 min, 平均119 min; 肾动脉阻断时间10~25, 平均17 min; 术中出血10~300 ml, 平均88 ml。术后均3 d下床活动, 0~7(平均2.6)d拔除引流管, 术后住院5~11 d, 平均6.8 d。全部患者均无围手术期并发症。术后病理检查提示20例均为透明细胞癌, 所有肿瘤组织病理检查切缘为阴性。病理分期均为T1N0M0。本组手术相关资料及我院同一外科医生腹腔镜肾部分切除术资料比较情况见表1。
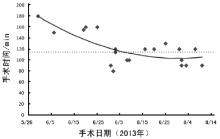
2组患者术前临床资料和术后病理学结果的比较差异无统计学意义(P> 0.05)。2组均无切缘阳性病例。2组手术出血量、术后住院时间、围手术期并发症发生率亦差异无统计学意义(P> 0.05)。在机器人辅助腹腔镜肾部分切除术的学习曲线中, 手术时间和热缺血时间均呈下降趋势(图1, 图2)。经过早期9例手术后, 机器人辅助腹腔镜肾部分切除术的平均手术时间即可接近最近20例腹腔镜肾部分切除术的平均手术时间。前9例机器人辅助腹腔镜肾部分切除术的平均手术时间是134 min, 热缺血时间是20 min, 远远长于后11例机器人辅助腹腔镜肾部分切除术平均手术时间107 min, 热缺血时间14 min。
| 表1 术式相关资料比较分析 |
 | 图1 机器人辅助腹腔镜肾部分切除术手术时间的学习曲线 |
 | 图2 机器人辅助腹腔镜肾部分切除术热缺血时间的学习曲线 |
机器人辅助腹腔镜肾部分切除术是21世纪发展起来的一项新技术, 自2004年起, 先后有9所医院报告了他们行机器人辅助腹腔镜保留肾单位肾部分切除术(RALPN), 根据早期的经验总结, RALPN与LPN各项结果均无明显差异[2, 3]。而在2008年, RALPN已经成为世界范围内数量增长最快的机器人手术方式[4]。由于机器人手术系统及手术费用相对昂贵, 机器人手术在国内尚未普及。但随着科技的进步以及具有我国自主知识产权的机器人手术系统的出现, 会让更多的患者享受到这一先进的医疗技术。因此, 如何提高手术技巧, 缩短学习曲线是十分值得研究的课题。
本研究结果显示, 术前临床资料和术后病理学结果的比较差异无统计学意义(P> 0.05)。切缘阳性率、手术出血量、术后住院时间、围手术期并发症发生率也差异无统计学意义(P> 0.05)。在机器人辅助腹腔镜肾部分切除术的学习曲线中, 手术时间(图1)和热缺血时间(图2)均呈下降趋势。
经过早期9例手术后, 机器人辅助腹腔镜肾部分切除术的平均手术时间即可接近最近20例腹腔镜肾部分切除术的平均手术时间。
总结我院开展机器人辅助腹腔镜肾部分切除术经验, 在缩短学习曲线方面有如下体会:首先, 我院术者在开展该手术之前即已拥有1 000余例腹腔镜肾部分切除术和300余例机器人辅助腹腔镜根治性前列腺切除术的经验。拥有腹腔镜肾部分切除及其他机器人手术经验的术者在学习机器人辅助腹腔镜肾部分切除术时将具有明显优势。因此, 开展机器人辅助腹腔镜手术应从简单手术开始, 积累一定经验后再做复杂手术。由于机器人手术难度较高, 无力反馈系统, 术者无触觉, 故在开展机器人手术之前, 通过模拟器乃至活体动物进行训练, 以熟悉达芬奇机器人系统。此外, 通过大量参观及作为助手参与机器人辅助腹腔镜肾部分切除术, 可以在独立开展手术前积累一定的实战经验。另外, 形成一个相对稳定的手术团队同样十分重要。本研究20例手术, 第一助手均由相对固定的、具有一定达芬奇机器人辅助腹腔镜手术经验的医师以担任, 手术护士有丰富的泌尿外科护理经验。良好的团队合作可显著缩短机器人辅助腹腔镜肾部分切除术的学习曲线。此外, 麻醉师在手术中作用关键, 及时发现术中高碳酸血症, 并将信息准确反馈给手术医师, 也是手术成功不可或缺的一环。还应注意的是, 学习曲线存在个体差异[5]。
掌握肾脏解剖及与邻近脏器的位置关系是完成手术的前提, 通过手术例数的增加, 术者也可不断加深对于解剖结构的理解[6]。我们认为随着手术经验的积累, 反复复习手术录像, 对肾脏血管及肾脏周围血管走行认识的不断深入, 能有效地控制机器人辅助腹腔镜肾部分切除术手术中的出血, 缩短手术时间和术后住院时间。此外, 注重同行间的交流讨论, 相互学习观摩, 也可有效避免不必要的失误, 大大加快手术技巧的提升。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|